Generates a grid of nodes. More...
Detailed Description
Generates a grid of nodes.
The GridGraph does exactly what the name implies, generates nodes in a grid pattern.
Grid graphs suit well to when you already have a grid based world. Features:
- You can update the graph during runtime (good for e.g Tower Defence or RTS games)
- Throw any scene at it, with minimal configurations you can get a good graph from it.
- Supports raycast and the funnel algorithm
- Predictable pattern
- Can apply penalty and walkability values from a supplied image
- Perfect for terrain worlds since it can make areas unwalkable depending on the slope
The The Snap Size button snaps the internal size of the graph to exactly contain the current number of nodes, i.e not contain 100.3 nodes but exactly 100 nodes.
This will make the "center" coordinate more accurate.
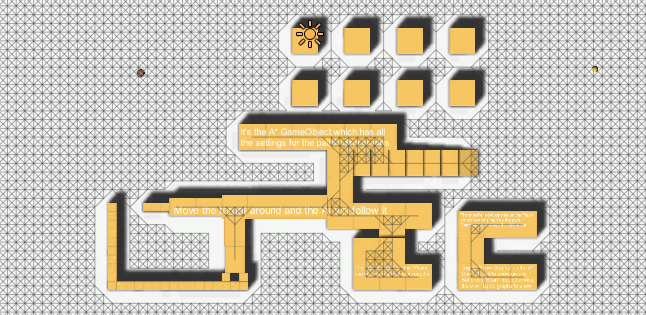
Updating the graph during runtime
Any graph which implements the IUpdatableGraph interface can be updated during runtime.
For grid graphs this is a great feature since you can update only a small part of the grid without causing any lag like a complete rescan would.
If you for example just have instantiated a sphere obstacle in the scene and you want to update the grid where that sphere was instantiated, you can do this:
Where ob is the obstacle you just instantiated (a GameObject).
As you can see, the UpdateGraphs function takes a Bounds parameter and it will send an update call to all updateable graphs.
A grid graph will update that area and a small margin around it equal to collision testing diameter/2
- See also
- Graph Updates during Runtime for more info about updating Graph Types during runtime
Hexagon graphs
The graph can be configured to work like a hexagon graph with some simple settings. Since 4.1.x the grid graph has a 'Shape' dropdown. If you set it to 'Hexagonal' the graph will behave as a hexagon graph. Often you may want to rotate the graph +45 or -45 degrees.

Note however that the snapping to the closest node is not exactly as you would expect in a real hexagon graph, but it is close enough that you will likely not notice.
Configure using code
Tree colliders
It seems that Unity will only generate tree colliders at runtime when the game is started. For this reason, the grid graph will not pick up tree colliders when outside of play mode but it will pick them up once the game starts. If it still does not pick them up make sure that the trees actually have colliders attached to them and that the tree prefabs are in the correct layer (the layer should be included in the 'Collision Testing' mask).
- See also
- Pathfinding.GraphCollision for documentation on the 'Height Testing' and 'Collision Testing' sections of the grid graph settings.
Classes | |
| struct | GridGraphScanData |
| struct | GridIndexMapper |
| class | TextureData |
| Used for using a texture as a source for a grid graph. More... | |
Public Member Functions | |
| GridGraph () | |
| virtual void | CalculateConnections (GridNodeBase node) |
| Calculates the grid connections for a single node. More... | |
| virtual void | CalculateConnections (int x, int z, GridNode node) |
| Calculates the grid connections for a single node. More... | |
| virtual void | CalculateConnections (int x, int z) |
| Calculates the grid connections for a single node. More... | |
| void | CalculateConnectionsForCellAndNeighbours (int x, int z) |
| Calculates the grid connections for a cell as well as its neighbours. More... | |
| GraphTransform | CalculateTransform () |
| Returns a new transform which transforms graph space to world space. More... | |
| bool | CheckConnection (GridNode node, int dir) |
| Returns if node is connected to it's neighbour in the specified direction. More... | |
| override int | CountNodes () |
| Number of nodes in the graph. More... | |
| virtual void | ErodeWalkableArea () |
| Erodes the walkable area. More... | |
| void | ErodeWalkableArea (int xmin, int zmin, int xmax, int zmax) |
| Erodes the walkable area. More... | |
| void | GenerateMatrix () |
| Generates the matrix used for translating nodes from grid coordinates to world coordinates. More... | |
| uint | GetConnectionCost (int dir) |
| override NNInfoInternal | GetNearest (Vector3 position, NNConstraint constraint, GraphNode hint) |
| Returns the nearest node to a position using the specified NNConstraint. More... | |
| override NNInfoInternal | GetNearestForce (Vector3 position, NNConstraint constraint) |
| Returns the nearest node to a position using the specified constraint . More... | |
| virtual GridNodeBase | GetNode (int x, int z) |
| Node in the specified cell. More... | |
| GridNode | GetNodeConnection (GridNode node, int dir) |
| override void | GetNodes (System.Action< GraphNode > action) |
| Calls a delegate with all nodes in the graph. More... | |
| List< GraphNode > | GetNodesInArea (Bounds bounds) |
| List< GraphNode > | GetNodesInArea (GraphUpdateShape shape) |
| List< GraphNode > | GetNodesInArea (Bounds bounds, GraphUpdateShape shape) |
| List< GraphNode > | GetNodesInRegion (Bounds bounds) |
| All nodes inside the bounding box. More... | |
| List< GraphNode > | GetNodesInRegion (GraphUpdateShape shape) |
| All nodes inside the shape. More... | |
| virtual List< GraphNode > | GetNodesInRegion (IntRect rect) |
| Get all nodes in a rectangle. More... | |
| virtual int | GetNodesInRegion (IntRect rect, GridNodeBase[] buffer) |
| Get all nodes in a rectangle. More... | |
| Int3 | GraphPointToWorld (int x, int z, float height) |
| Transform a point in graph space to world space. More... | |
| bool | HasNodeConnection (GridNode node, int dir) |
| bool | HasNodeConnection (int index, int x, int z, int dir) |
| virtual bool | IsValidConnection (GridNodeBase node1, GridNodeBase node2) |
| Returns true if a connection between the adjacent nodes n1 and n2 is valid. More... | |
| bool | Linecast (Vector3 from, Vector3 to) |
| Returns if there is an obstacle between from and to on the graph. More... | |
| bool | Linecast (Vector3 from, Vector3 to, GraphNode hint) |
| Returns if there is an obstacle between from and to on the graph. More... | |
| bool | Linecast (Vector3 from, Vector3 to, GraphNode hint, out GraphHitInfo hit) |
| Returns if there is an obstacle between from and to on the graph. More... | |
| bool | Linecast (Vector3 from, Vector3 to, GraphNode hint, out GraphHitInfo hit, List< GraphNode > trace) |
| Returns if there is an obstacle between from and to on the graph. More... | |
| bool | Linecast (GridNodeBase fromNode, GridNodeBase toNode) |
| Returns if there is an obstacle between the two nodes on the graph. More... | |
| override void | OnDrawGizmos (RetainedGizmos gizmos, bool drawNodes) |
| Draw gizmos for the graph. More... | |
| virtual void | RecalculateCell (int x, int z, bool resetPenalties=true, bool resetTags=true) |
| Recalculates single node in the graph. More... | |
| override void | RelocateNodes (Matrix4x4 deltaMatrix) |
| Moves the nodes in this graph. More... | |
| void | RelocateNodes (Vector3 center, Quaternion rotation, float nodeSize, float aspectRatio=1, float isometricAngle=0) |
| Relocate the grid graph using new settings. More... | |
| void | SetDimensions (int width, int depth, float nodeSize) |
| Updates unclampedSize from width, depth and nodeSize values. More... | |
| void | SetNodeConnection (GridNode node, int dir, bool value) |
| void | SetNodeConnection (int index, int x, int z, int dir, bool value) |
| Set if connection in the specified direction should be enabled. More... | |
| virtual void | SetUpOffsetsAndCosts () |
| Sets up neighbourOffsets with the current settings. More... | |
| bool | SnappedLinecast (Vector3 from, Vector3 to, GraphNode hint, out GraphHitInfo hit) |
| Returns if there is an obstacle between from and to on the graph. More... | |
| virtual void | UpdateNodePositionCollision (GridNode node, int x, int z, bool resetPenalty=true) |
| Updates position, walkability and penalty for the node. More... | |
| void | UpdateSizeFromWidthDepth () |
| Updates unclampedSize from width, depth and nodeSize values. More... | |
| void | UpdateTransform () |
| Updates the transform field which transforms graph space to world space. More... | |
 Public Member Functions inherited from NavGraph Public Member Functions inherited from NavGraph | |
| NNInfoInternal | GetNearest (Vector3 position) |
| Returns the nearest node to a position. More... | |
| NNInfoInternal | GetNearest (Vector3 position, NNConstraint constraint) |
| Returns the nearest node to a position using the specified NNConstraint. More... | |
| void | GetNodes (System.Func< GraphNode, bool > action) |
| Calls a delegate with all nodes in the graph until the delegate returns false. More... | |
| void | RelocateNodes (Matrix4x4 oldMatrix, Matrix4x4 newMatrix) |
| Moves nodes in this graph. More... | |
| void | Scan () |
| Scan the graph. More... | |
| void | ScanGraph () |
| Scan the graph. More... | |
| void | SetMatrix (Matrix4x4 m) |
| Use to set both matrix and inverseMatrix at the same time. More... | |
Static Public Member Functions | |
| static void | CalculateConnections (GridNode node) |
| Calculates the grid connections for a single node. More... | |
| static float | ConvertHexagonSizeToNodeSize (InspectorGridHexagonNodeSize mode, float value) |
| static float | ConvertNodeSizeToHexagonSize (InspectorGridHexagonNodeSize mode, float value) |
Public Attributes | |
| const int | getNearestForceOverlap = 2 |
| In GetNearestForce, determines how far to search after a valid node has been found. More... | |
| readonly uint [] | neighbourCosts = new uint[8] |
| Costs to neighbour nodes. More... | |
| readonly int [] | neighbourOffsets = new int[8] |
| Index offset to get neighbour nodes. More... | |
| GridNode [] | nodes |
| All nodes in this graph. More... | |
| Public Attributes inherited from NavGraph | |
| AstarPath | active |
| Reference to the AstarPath object in the scene. More... | |
| bool | drawGizmos = true |
| Enable to draw gizmos in the Unity scene view. More... | |
| uint | graphIndex |
| Index of the graph, used for identification purposes. More... | |
| Guid | guid |
| Used as an ID of the graph, considered to be unique. More... | |
| bool | infoScreenOpen |
| Used in the editor to check if the info screen is open. More... | |
| uint | initialPenalty |
| Default penalty to apply to all nodes. More... | |
| Matrix4x4 | inverseMatrix = Matrix4x4.identity |
| Inverse of matrix. More... | |
| Matrix4x4 | matrix = Matrix4x4.identity |
| A matrix for translating/rotating/scaling the graph. More... | |
| string | name |
| Name of the graph. More... | |
| bool | open |
| Is the graph open in the editor. More... | |
Static Public Attributes | |
| static int | BATCH_SIZE = 512 |
| static readonly int [] | neighbourXOffsets = { 0, 1, 0, -1, 1, 1, -1, -1 } |
| Offsets in the X direction for neighbour nodes. More... | |
| static readonly int [] | neighbourZOffsets = { -1, 0, 1, 0, -1, 1, 1, -1 } |
| Offsets in the Z direction for neighbour nodes. More... | |
| static bool | USE_BURST = true |
| static bool | USE_BURST_UPDATE = true |
Protected Member Functions | |
| void | CalculateAffectedRegions (GraphUpdateObject o, out IntRect originalRect, out IntRect affectRect, out IntRect physicsRect, out bool willChangeWalkability, out int erosion) |
| bool | ClipLineSegmentToBounds (Vector3 a, Vector3 b, out Vector3 outA, out Vector3 outB) |
| Clips a line segment in graph space to the graph bounds. More... | |
| override void | DeserializeExtraInfo (GraphSerializationContext ctx) |
| Deserializes graph type specific node data. More... | |
| override void | DeserializeSettingsCompatibility (GraphSerializationContext ctx) |
| An old format for serializing settings. More... | |
| override void | DestroyAllNodes () |
| Destroys all nodes in the graph. More... | |
| virtual bool | ErosionAnyFalseConnections (GraphNode baseNode) |
| True if the node has any blocked connections. More... | |
| virtual List< GraphNode > | GetNodesInRegion (Bounds bounds, GraphUpdateShape shape) |
| All nodes inside the shape or if null, the bounding box. More... | |
| IntRect | GetRectFromBounds (Bounds bounds) |
| A rect with all nodes that the bounds could touch. More... | |
| void | JobPenaltyAngle (NativeArray< uint > nodePenalties, NativeArray< float4 > nodeNormals, Vector3 up, JobDependencyTracker dependencyTracker) |
| void | JobPenaltyPosition (NativeArray< uint > nodePenalties, NativeArray< Vector3 > nodePositions, JobDependencyTracker dependencyTracker) |
| override void | OnDestroy () |
| This function will be called when this graph is destroyed. More... | |
| override void | PostDeserialization (GraphSerializationContext ctx) |
| Called after all deserialization has been done for all graphs. More... | |
| override IEnumerable< Progress > | ScanInternal (bool async) |
| Internal method to scan the graph. More... | |
| override void | SerializeExtraInfo (GraphSerializationContext ctx) |
| Serializes graph type specific node data. More... | |
| Protected Member Functions inherited from NavGraph | |
| void | DrawUnwalkableNodes (float size) |
| virtual IEnumerable< Progress > | ScanInternal () |
| Internal method to scan the graph. More... | |
Static Protected Member Functions | |
| static float | CrossMagnitude (Vector2 a, Vector2 b) |
| Magnitude of the cross product a x b. More... | |
| static long | CrossMagnitude (Int2 a, Int2 b) |
| Magnitude of the cross product a x b. More... | |
Static Package Attributes | |
| static readonly int [] | hexagonNeighbourIndices = { 0, 1, 5, 2, 3, 7 } |
| Which neighbours are going to be used when neighbours=6. More... | |
Properties | |
| int | Depth [get, set] |
| virtual int | LayerCount [get] |
| Number of layers in the graph. More... | |
| Vector2 | size [get, protected set] |
| Size of the grid. More... | |
| GraphTransform | transform [get, private set] |
| Determines how the graph transforms graph space to world space. More... | |
| virtual bool | uniformWidthDepthGrid [get] |
| This is placed here so generators inheriting from this one can override it and set it to false. More... | |
| int | Width [get, set] |
| Properties inherited from NavGraph | |
| bool | exists [get] |
| True if the graph exists, false if it has been destroyed. More... | |
| string IGraphInternals. | SerializedEditorSettings [get, set] |
| Properties inherited from IGraphInternals | |
| string | SerializedEditorSettings [get, set] |
| Properties inherited from ITransformedGraph | |
| GraphTransform | transform [get] |
Private Member Functions | |
| void | CalculateDimensions (out int width, out int depth, out float nodeSize) |
| Calculates the width/depth of the graph from unclampedSize and nodeSize. More... | |
| GraphUpdateThreading IUpdatableGraph. | CanUpdateAsync (GraphUpdateObject o) |
| void | CreateNavmeshSurfaceVisualization (GridNodeBase[] nodes, int nodeCount, GraphGizmoHelper helper) |
| Draw the surface as well as an outline of the grid graph. More... | |
| void | ErodeNode (GraphNode node) |
| Internal method used for erosion. More... | |
| void | ErodeNodeWithTags (GraphNode node, int iteration) |
| Internal method used for erosion. More... | |
| void | ErodeNodeWithTagsInit (GraphNode node) |
| Internal method used for erosion. More... | |
| GridNode | GetNodeConnection (int index, int x, int z, int dir) |
| Get the connecting node from the node at (x,z) in the specified direction. More... | |
| void | RemoveGridGraphFromStatic () |
| IEnumerable< Progress > | ScanInternalBurst (bool async) |
| void IUpdatableGraph. | UpdateArea (GraphUpdateObject o) |
| Internal function to update an area of the graph. More... | |
| JobHandle | UpdateAreaBurst (GridNode[] newNodes, Int2 nodeArrayBounds, IntRect bounds, JobDependencyTracker dependencyTracker, JobHandle nodesDependsOn, Allocator allocationMethod, bool allowReadFromGraph, GraphUpdateObject graphUpdateObject=null) |
| void IUpdatableGraph. | UpdateAreaInit (GraphUpdateObject o) |
| May be called on the Unity thread before starting the update. More... | |
| void IUpdatableGraph. | UpdateAreaPost (GraphUpdateObject o) |
| May be called on the Unity thread after executing the update. More... | |
Inspector - Settings | |
| float | maxClimb [get, set] |
| The max y coordinate difference between two nodes to enable a connection. More... | |
| bool | useRaycastNormal [get] |
| Use heigh raycasting normal for max slope calculation. More... | |
| InspectorGridMode | inspectorGridMode = InspectorGridMode.Grid |
| Determines the layout of the grid graph inspector in the Unity Editor. More... | |
| InspectorGridHexagonNodeSize | inspectorHexagonSizeMode = InspectorGridHexagonNodeSize.Width |
| Determines how the size of each hexagon is set in the inspector. More... | |
| int | width |
| Width of the grid in nodes. More... | |
| int | depth |
| Depth (height) of the grid in nodes. More... | |
| float | aspectRatio = 1F |
| Scaling of the graph along the X axis. More... | |
| float | isometricAngle |
| Angle to use for the isometric projection. More... | |
| bool | uniformEdgeCosts |
| If true, all edge costs will be set to the same value. More... | |
| Vector3 | rotation |
| Rotation of the grid in degrees. More... | |
| Vector3 | center |
| Center point of the grid. More... | |
| Vector2 | unclampedSize |
| Size of the grid. More... | |
| float | nodeSize = 1 |
| Size of one node in world units. More... | |
| GraphCollision | collision |
| Settings on how to check for walkability and height. More... | |
| float | maxStepHeight = 0.4F |
| The max y coordinate difference between two nodes to enable a connection. More... | |
| bool | maxStepUsesSlope = true |
| Take the slope into account for maxClimb. More... | |
| float | maxSlope = 90 |
| The max slope in degrees for a node to be walkable. More... | |
| int | erodeIterations |
| Erosion of the graph. More... | |
| bool | erosionUseTags |
| Use tags instead of walkability for erosion. More... | |
| int | erosionFirstTag = 1 |
| Tag to start from when using tags for erosion. More... | |
| NumNeighbours | neighbours = NumNeighbours.Eight |
| Number of neighbours for each node. More... | |
| bool | cutCorners = true |
| If disabled, will not cut corners on obstacles. More... | |
| float | penaltyPositionOffset |
| Offset for the position when calculating penalty. More... | |
| bool | penaltyPosition |
| Use position (y-coordinate) to calculate penalty. More... | |
| float | penaltyPositionFactor = 1F |
| Scale factor for penalty when calculating from position. More... | |
| bool | penaltyAngle |
| float | penaltyAngleFactor = 100F |
| How much penalty is applied depending on the slope of the terrain. More... | |
| float | penaltyAnglePower = 1 |
| How much extra to penalize very steep angles. More... | |
| bool | useJumpPointSearch |
| Use jump point search to speed up pathfinding. More... | |
| bool | showMeshOutline = true |
| Show an outline of the grid nodes in the Unity Editor. More... | |
| bool | showNodeConnections |
| Show the connections between the grid nodes in the Unity Editor. More... | |
| bool | showMeshSurface = true |
| Show the surface of the graph. More... | |
| TextureData | textureData = new TextureData() |
| Holds settings for using a texture as source for a grid graph. More... | |
Constructor & Destructor Documentation
◆ GridGraph()
| GridGraph | ( | ) |
Member Function Documentation
◆ CalculateAffectedRegions()
|
protected |
◆ CalculateConnections() [1/4]
|
static |
Calculates the grid connections for a single node.
- Deprecated:
- Use the instance function instead
◆ CalculateConnections() [2/4]
|
virtual |
Calculates the grid connections for a single node.
Convenience function, it's slightly faster to use CalculateConnections(int,int) but that will only show when calculating for a large number of nodes. This function will also work for both grid graphs and layered grid graphs.
Reimplemented in LayerGridGraph.
◆ CalculateConnections() [3/4]
|
virtual |
Calculates the grid connections for a single node.
- Deprecated:
- Use CalculateConnections(x,z) or CalculateConnections(node) instead
◆ CalculateConnections() [4/4]
|
virtual |
Calculates the grid connections for a single node.
Note that to ensure that connections are completely up to date after updating a node you have to calculate the connections for both the changed node and its neighbours.
In a layered grid graph, this will recalculate the connections for all nodes in the (x,z) cell (it may have multiple layers of nodes).
Reimplemented in LayerGridGraph.
◆ CalculateConnectionsForCellAndNeighbours()
| void CalculateConnectionsForCellAndNeighbours | ( | int | x, |
| int | z | ||
| ) |
Calculates the grid connections for a cell as well as its neighbours.
This is a useful utility function if you want to modify the walkability of a single node in the graph.
◆ CalculateDimensions()
|
private |
Calculates the width/depth of the graph from unclampedSize and nodeSize.
The node size may be changed due to constraints that the width/depth is not allowed to be larger than 1024 (artificial limit).
◆ CalculateTransform()
| GraphTransform CalculateTransform | ( | ) |
Returns a new transform which transforms graph space to world space.
Does not update the transform field.
- See also
- UpdateTransform
◆ CanUpdateAsync()
|
private |
Implements IUpdatableGraph.
◆ CheckConnection()
| bool CheckConnection | ( | GridNode | node, |
| int | dir | ||
| ) |
Returns if node is connected to it's neighbour in the specified direction.
This will also return true if neighbours = NumNeighbours.Four, the direction is diagonal and one can move through one of the adjacent nodes to the targeted node.
- See also
- neighbourOffsets
◆ ClipLineSegmentToBounds()
|
protected |
Clips a line segment in graph space to the graph bounds.
That is (0,0,0) is the bottom left corner of the graph and (width,0,depth) is the top right corner. The first node is placed at (0.5,y,0.5). One unit distance is the same as nodeSize.
Returns false if the line segment does not intersect the graph at all.
◆ ConvertHexagonSizeToNodeSize()
|
static |
◆ ConvertNodeSizeToHexagonSize()
|
static |
◆ CountNodes()
|
virtual |
Number of nodes in the graph.
Note that this is, unless the graph type has overriden it, an O(n) operation.
This is an O(1) operation for grid graphs and point graphs. For layered grid graphs it is an O(n) operation.
Reimplemented from NavGraph.
Reimplemented in LayerGridGraph.
◆ CreateNavmeshSurfaceVisualization()
|
private |
Draw the surface as well as an outline of the grid graph.
The nodes will be drawn as squares (or hexagons when using neighbours = Six).
◆ CrossMagnitude() [1/2]
|
staticprotected |
Magnitude of the cross product a x b.
◆ CrossMagnitude() [2/2]
◆ DeserializeExtraInfo()
|
protectedvirtual |
Deserializes graph type specific node data.
- See also
- SerializeExtraInfo
Reimplemented from NavGraph.
Reimplemented in LayerGridGraph.
◆ DeserializeSettingsCompatibility()
|
protectedvirtual |
An old format for serializing settings.
- Deprecated:
- This is deprecated now, but the deserialization code is kept to avoid loosing data when upgrading from older versions.
Reimplemented from NavGraph.
◆ DestroyAllNodes()
|
protectedvirtual |
Destroys all nodes in the graph.
- Warning
- This is an internal method. Unless you have a very good reason, you should probably not call it.
Reimplemented from NavGraph.
◆ ErodeNode()
|
private |
Internal method used for erosion.
◆ ErodeNodeWithTags()
|
private |
Internal method used for erosion.
◆ ErodeNodeWithTagsInit()
|
private |
Internal method used for erosion.
◆ ErodeWalkableArea() [1/2]
|
virtual |
Erodes the walkable area.
- See also
- erodeIterations
◆ ErodeWalkableArea() [2/2]
| void ErodeWalkableArea | ( | int | xmin, |
| int | zmin, | ||
| int | xmax, | ||
| int | zmax | ||
| ) |
◆ ErosionAnyFalseConnections()
|
protectedvirtual |
True if the node has any blocked connections.
For 4 and 8 neighbours the 4 axis aligned connections will be checked. For 6 neighbours all 6 neighbours will be checked.
Internal method used for erosion.
Reimplemented in LayerGridGraph.
◆ GenerateMatrix()
| void GenerateMatrix | ( | ) |
Generates the matrix used for translating nodes from grid coordinates to world coordinates.
- Deprecated:
- This method has been renamed to UpdateTransform
◆ GetConnectionCost()
| uint GetConnectionCost | ( | int | dir | ) |
◆ GetNearest()
|
virtual |
Returns the nearest node to a position using the specified NNConstraint.
- Parameters
-
position The position to try to find a close node to hint Can be passed to enable some graph generators to find the nearest node faster. constraint Can for example tell the function to try to return a walkable node. If you do not get a good node back, consider calling GetNearestForce.
Reimplemented from NavGraph.
Reimplemented in LayerGridGraph.
◆ GetNearestForce()
|
virtual |
Returns the nearest node to a position using the specified constraint .
- Returns
- an NNInfo. This method will only return an empty NNInfo if there are no nodes which comply with the specified constraint.
Reimplemented from NavGraph.
Reimplemented in LayerGridGraph.
◆ GetNode()
|
virtual |
Node in the specified cell.
Returns null if the coordinate is outside the grid.
If you know the coordinate is inside the grid and you are looking to maximize performance then you can look up the node in the internal array directly which is slightly faster.
- See also
- nodes
Reimplemented in LayerGridGraph.
◆ GetNodeConnection() [1/2]
◆ GetNodeConnection() [2/2]
|
private |
◆ GetNodes()
|
virtual |
Calls a delegate with all nodes in the graph.
This is the primary way of iterating through all nodes in a graph.
Do not change the graph structure inside the delegate.
If you want to store all nodes in a list you can do this
- See also
- Pathfinding.AstarData.GetNodes
Implements NavGraph.
Reimplemented in LayerGridGraph.
◆ GetNodesInArea() [1/3]
| List<GraphNode> GetNodesInArea | ( | Bounds | bounds | ) |
- Deprecated:
- This method has been renamed to GetNodesInRegion
◆ GetNodesInArea() [2/3]
| List<GraphNode> GetNodesInArea | ( | GraphUpdateShape | shape | ) |
- Deprecated:
- This method has been renamed to GetNodesInRegion
◆ GetNodesInArea() [3/3]
| List<GraphNode> GetNodesInArea | ( | Bounds | bounds, |
| GraphUpdateShape | shape | ||
| ) |
- Deprecated:
- This method has been renamed to GetNodesInRegion
◆ GetNodesInRegion() [1/5]
| List<GraphNode> GetNodesInRegion | ( | Bounds | bounds | ) |
All nodes inside the bounding box.
- Note
- Be nice to the garbage collector and pool the list when you are done with it (optional)
◆ GetNodesInRegion() [2/5]
| List<GraphNode> GetNodesInRegion | ( | GraphUpdateShape | shape | ) |
All nodes inside the shape.
- Note
- Be nice to the garbage collector and pool the list when you are done with it (optional)
◆ GetNodesInRegion() [3/5]
|
protectedvirtual |
All nodes inside the shape or if null, the bounding box.
If a shape is supplied, it is assumed to be contained inside the bounding box.
- See also
- GraphUpdateShape.GetBounds
Reimplemented in LayerGridGraph.
◆ GetNodesInRegion() [4/5]
Get all nodes in a rectangle.
- Parameters
-
rect Region in which to return nodes. It will be clamped to the grid.
Reimplemented in LayerGridGraph.
◆ GetNodesInRegion() [5/5]
|
virtual |
Get all nodes in a rectangle.
- Parameters
-
rect Region in which to return nodes. It will be clamped to the grid. buffer Buffer in which the nodes will be stored. Should be at least as large as the number of nodes that can exist in that region.
- Returns
- The number of nodes written to the buffer.
- Note
- This method is much faster than GetNodesInRegion(IntRect) which returns a list because this method can make use of the highly optimized System.Array.Copy method.
Reimplemented in LayerGridGraph.
◆ GetRectFromBounds()
|
protected |
A rect with all nodes that the bounds could touch.
This correctly handles rotated graphs and other transformations. The returned rect is guaranteed to not extend outside the graph bounds.
◆ GraphPointToWorld()
| Int3 GraphPointToWorld | ( | int | x, |
| int | z, | ||
| float | height | ||
| ) |
Transform a point in graph space to world space.
This will give you the node position for the node at the given x and z coordinate if it is at the specified height above the base of the graph.
◆ HasNodeConnection() [1/2]
| bool HasNodeConnection | ( | GridNode | node, |
| int | dir | ||
| ) |
◆ HasNodeConnection() [2/2]
| bool HasNodeConnection | ( | int | index, |
| int | x, | ||
| int | z, | ||
| int | dir | ||
| ) |
◆ IsValidConnection()
|
virtual |
Returns true if a connection between the adjacent nodes n1 and n2 is valid.
Also takes into account if the nodes are walkable.
This method may be overriden if you want to customize what connections are valid. It must however hold that IsValidConnection(a,b) == IsValidConnection(b,a).
This is used for calculating the connections when the graph is scanned or updated.
- See also
- CalculateConnections
◆ JobPenaltyAngle()
|
protected |
◆ JobPenaltyPosition()
|
protected |
◆ Linecast() [1/5]
| bool Linecast | ( | Vector3 | from, |
| Vector3 | to | ||
| ) |
Returns if there is an obstacle between from and to on the graph.
This is not the same as Physics.Linecast, this function traverses the graph and looks for collisions.
- A* Pro Feature:
- This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited
The Pro version can be bought here
Implements IRaycastableGraph.
◆ Linecast() [2/5]
| bool Linecast | ( | Vector3 | from, |
| Vector3 | to, | ||
| GraphNode | hint | ||
| ) |
Returns if there is an obstacle between from and to on the graph.
- Parameters
-
[in] from Point to linecast from [in] to Point to linecast to [in] hint This parameter is deprecated. It will be ignored.
This is not the same as Physics.Linecast, this function traverses the graph and looks for collisions.
- A* Pro Feature:
- This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited
The Pro version can be bought here
Implements IRaycastableGraph.
◆ Linecast() [3/5]
| bool Linecast | ( | Vector3 | from, |
| Vector3 | to, | ||
| GraphNode | hint, | ||
| out GraphHitInfo | hit | ||
| ) |
Returns if there is an obstacle between from and to on the graph.
- Parameters
-
[in] from Point to linecast from [in] to Point to linecast to [out] hit Contains info on what was hit, see GraphHitInfo [in] hint This parameter is deprecated. It will be ignored.
This is not the same as Physics.Linecast, this function traverses the graph and looks for collisions.
- A* Pro Feature:
- This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited
The Pro version can be bought here
Implements IRaycastableGraph.
◆ Linecast() [4/5]
| bool Linecast | ( | Vector3 | from, |
| Vector3 | to, | ||
| GraphNode | hint, | ||
| out GraphHitInfo | hit, | ||
| List< GraphNode > | trace | ||
| ) |
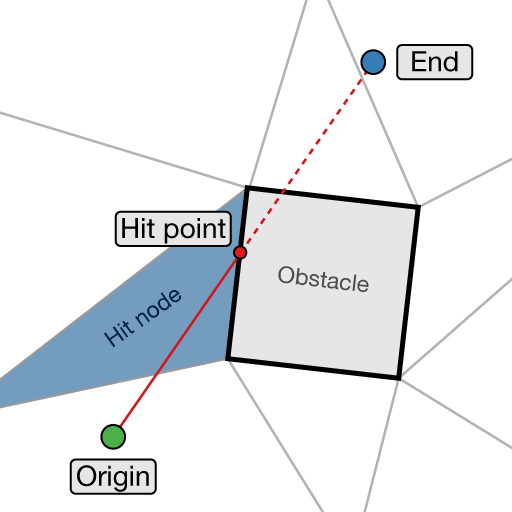
Returns if there is an obstacle between from and to on the graph.
- Parameters
-
[in] from Point to linecast from [in] to Point to linecast to [out] hit Contains info on what was hit, see GraphHitInfo [in] hint This parameter is deprecated. It will be ignored. trace If a list is passed, then it will be filled with all nodes the linecast traverses
This is not the same as Physics.Linecast, this function traverses the graph and looks for collisions.
- Version
- In 3.6.8 this method was rewritten to improve accuracy and performance. Previously it used a sampling approach which could cut corners of obstacles slightly and was pretty inefficient.
- A* Pro Feature:
- This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited
The Pro version can be bought here
Implements IRaycastableGraph.
◆ Linecast() [5/5]
| bool Linecast | ( | GridNodeBase | fromNode, |
| GridNodeBase | toNode | ||
| ) |
Returns if there is an obstacle between the two nodes on the graph.
This method is very similar to the other Linecast methods however it is much faster due to being able to use only integer math and not having to look up which node is closest to a particular input point.
- A* Pro Feature:
- This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited
The Pro version can be bought here
◆ OnDestroy()
|
protectedvirtual |
This function will be called when this graph is destroyed.
Reimplemented from NavGraph.
Reimplemented in LayerGridGraph.
◆ OnDrawGizmos()
|
virtual |
Draw gizmos for the graph.
Reimplemented from NavGraph.
◆ PostDeserialization()
|
protectedvirtual |
Called after all deserialization has been done for all graphs.
Can be used to set up more graph data which is not serialized
Reimplemented from NavGraph.
Reimplemented in LayerGridGraph.
◆ RecalculateCell()
|
virtual |
Recalculates single node in the graph.
For a layered grid graph this will recalculate all nodes at a specific (x,z) cell in the grid. For grid graphs this will simply recalculate the single node at those coordinates.
- Parameters
-
x X coordinate of the cell z Z coordinate of the cell resetPenalties If true, the penalty of the nodes will be reset to the initial value as if the graph had just been scanned (this excludes texture data however which is only done when scanning the graph). resetTags If true, the tag will be reset to zero (the default tag).
- Note
- This must only be called when it is safe to update nodes. For example when scanning the graph or during a graph update.
- This will not recalculate any connections as this method is often run for several adjacent nodes at a time. After you have recalculated all the nodes you will have to recalculate the connections for the changed nodes as well as their neighbours.
- See also
- CalculateConnections
Reimplemented in LayerGridGraph.
◆ RelocateNodes() [1/2]
|
virtual |
Moves the nodes in this graph.
Multiplies all node positions by deltaMatrix.
For example if you want to move all your nodes in e.g a point graph 10 units along the X axis from the initial position
- Note
- For grid graphs, navmesh graphs and recast graphs it is recommended to use their custom overloads of the RelocateNodes method which take parameters for e.g center and nodeSize (and additional parameters) instead since they are both easier to use and are less likely to mess up pathfinding.
- Warning
- This method is lossy for PointGraphs, so calling it many times may cause node positions to lose precision. For example if you set the scale to 0 in one call then all nodes will be scaled/moved to the same point and you will not be able to recover their original positions. The same thing happens for other - less extreme - values as well, but to a lesser degree.
Reimplemented from NavGraph.
◆ RelocateNodes() [2/2]
| void RelocateNodes | ( | Vector3 | center, |
| Quaternion | rotation, | ||
| float | nodeSize, | ||
| float | aspectRatio = 1, |
||
| float | isometricAngle = 0 |
||
| ) |
Relocate the grid graph using new settings.
This will move all nodes in the graph to new positions which matches the new settings.
◆ RemoveGridGraphFromStatic()
|
private |
◆ ScanInternal()
|
protectedvirtual |
Internal method to scan the graph.
Called from AstarPath.ScanAsync. Override this function to implement custom scanning logic. Progress objects can be yielded to show progress info in the editor and to split up processing over several frames when using async scanning.
Reimplemented from NavGraph.
◆ ScanInternalBurst()
|
private |
◆ SerializeExtraInfo()
|
protectedvirtual |
Serializes graph type specific node data.
This function can be overriden to serialize extra node information (or graph information for that matter) which cannot be serialized using the standard serialization. Serialize the data in any way you want and return a byte array. When loading, the exact same byte array will be passed to the DeserializeExtraInfo function.
These functions will only be called if node serialization is enabled.
Reimplemented from NavGraph.
Reimplemented in LayerGridGraph.
◆ SetDimensions()
| void SetDimensions | ( | int | width, |
| int | depth, | ||
| float | nodeSize | ||
| ) |
Updates unclampedSize from width, depth and nodeSize values.
Also generates a new matrix .
- Note
- This does not rescan the graph, that must be done with Scan
You should use this method instead of setting the width and depth fields as the grid dimensions are not defined by the width and depth variables but by the unclampedSize and center variables.
◆ SetNodeConnection() [1/2]
| void SetNodeConnection | ( | GridNode | node, |
| int | dir, | ||
| bool | value | ||
| ) |
◆ SetNodeConnection() [2/2]
| void SetNodeConnection | ( | int | index, |
| int | x, | ||
| int | z, | ||
| int | dir, | ||
| bool | value | ||
| ) |
Set if connection in the specified direction should be enabled.
Note that bounds checking will still be done when getting the connection value again, so it is not necessarily true that HasNodeConnection will return true just because you used SetNodeConnection on a node to set a connection to true.
- Parameters
-
index Index of the node x X coordinate of the node z Z coordinate of the node dir Direction from 0 up to but excluding 8. value Enable or disable the connection
- Note
- This is identical to Pathfinding.Node.SetConnectionInternal
◆ SetUpOffsetsAndCosts()
|
virtual |
Sets up neighbourOffsets with the current settings.
neighbourOffsets, neighbourCosts, neighbourXOffsets and neighbourZOffsets are set up.
The cost for a non-diagonal movement between two adjacent nodes is RoundToInt (nodeSize * Int3.Precision)
The cost for a diagonal movement between two adjacent nodes is RoundToInt (nodeSize * Sqrt (2) * Int3.Precision)
◆ SnappedLinecast()
| bool SnappedLinecast | ( | Vector3 | from, |
| Vector3 | to, | ||
| GraphNode | hint, | ||
| out GraphHitInfo | hit | ||
| ) |
Returns if there is an obstacle between from and to on the graph.
- Parameters
-
[in] from Point to linecast from. [in] to Point to linecast to. [out] hit Contains info on what was hit, see GraphHitInfo. [in] hint This parameter is deprecated. It will be ignored.
This function is different from the other Linecast functions since it snaps the start and end positions to the centers of the closest nodes on the graph. This is not the same as Physics.Linecast, this function traverses the graph and looks for collisions.
- Version
- Since 3.6.8 this method uses the same implementation as the other linecast methods so there is no performance boost to using it.
- In 3.6.8 this method was rewritten and that fixed a large number of bugs. Previously it had not always followed the line exactly as it should have and the hit output was not very accurate (for example the hit point was just the node position instead of a point on the edge which was hit).
- A* Pro Feature:
- This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited
The Pro version can be bought here
◆ UpdateArea()
|
private |
Internal function to update an area of the graph.
Implements IUpdatableGraph.
◆ UpdateAreaBurst()
|
private |
◆ UpdateAreaInit()
|
private |
May be called on the Unity thread before starting the update.
- See also
- CanUpdateAsync
Implements IUpdatableGraph.
◆ UpdateAreaPost()
|
private |
May be called on the Unity thread after executing the update.
- See also
- CanUpdateAsync
Implements IUpdatableGraph.
◆ UpdateNodePositionCollision()
|
virtual |
Updates position, walkability and penalty for the node.
Assumes that collision.Initialize (...) has been called before this function
- Deprecated:
- Use RecalculateCell instead which works both for grid graphs and layered grid graphs.
◆ UpdateSizeFromWidthDepth()
| void UpdateSizeFromWidthDepth | ( | ) |
Updates unclampedSize from width, depth and nodeSize values.
- Deprecated:
- Use SetDimensions instead
◆ UpdateTransform()
| void UpdateTransform | ( | ) |
Updates the transform field which transforms graph space to world space.
In graph space all nodes are laid out in the XZ plane with the first node having a corner in the origin. One unit in graph space is one node so the first node in the graph is at (0.5,0) the second one at (1.5,0) etc.
This takes the current values of the parameters such as position and rotation into account. The transform that was used the last time the graph was scanned is stored in the transform field.
The transform field is calculated using this method when the graph is scanned. The width, depth variables are also updated based on the unclampedSize field.
Member Data Documentation
◆ aspectRatio
| float aspectRatio = 1F |
Scaling of the graph along the X axis.
This should be used if you want different scales on the X and Y axis of the grid
◆ BATCH_SIZE
|
static |
◆ center
| Vector3 center |
Center point of the grid.
◆ collision
| GraphCollision collision |
Settings on how to check for walkability and height.
◆ cutCorners
| bool cutCorners = true |
If disabled, will not cut corners on obstacles.
If connections is Eight, obstacle corners might be cut by a connection, setting this to false disables that.
◆ depth
| int depth |
Depth (height) of the grid in nodes.
- See also
- SetDimensions
◆ erodeIterations
| int erodeIterations |
Erosion of the graph.
The graph can be eroded after calculation. This means a margin is put around unwalkable nodes or other unwalkable connections. It is really good if your graph contains ledges where the nodes without erosion are walkable too close to the edge.
Below is an image showing a graph with erode iterations 0, 1 and 2
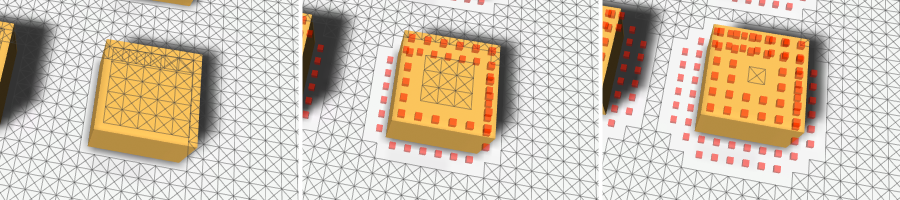
- Note
- A high number of erode iterations can seriously slow down graph updates during runtime (GraphUpdateObject) and should be kept as low as possible.
- See also
- erosionUseTags
◆ erosionFirstTag
| int erosionFirstTag = 1 |
Tag to start from when using tags for erosion.
- See also
- erosionUseTags
- erodeIterations
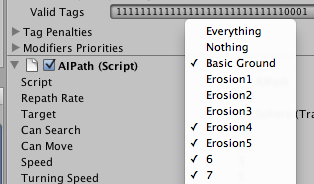
◆ erosionUseTags
| bool erosionUseTags |
Use tags instead of walkability for erosion.
Tags will be used for erosion instead of marking nodes as unwalkable. The nodes will be marked with tags in an increasing order starting with the tag erosionFirstTag. Debug with the Tags mode to see the effect. With this enabled you can in effect set how close different AIs are allowed to get to walls using the Valid Tags field on the Seeker component.
- See also
- erosionFirstTag
◆ getNearestForceOverlap
| const int getNearestForceOverlap = 2 |
In GetNearestForce, determines how far to search after a valid node has been found.
◆ hexagonNeighbourIndices
|
staticpackage |
Which neighbours are going to be used when neighbours=6.
◆ inspectorGridMode
| InspectorGridMode inspectorGridMode = InspectorGridMode.Grid |
Determines the layout of the grid graph inspector in the Unity Editor.
This field is only used in the editor, it has no effect on the rest of the game whatsoever.
◆ inspectorHexagonSizeMode
| InspectorGridHexagonNodeSize inspectorHexagonSizeMode = InspectorGridHexagonNodeSize.Width |
Determines how the size of each hexagon is set in the inspector.
For hexagons the normal nodeSize field doesn't really correspond to anything specific on the hexagon's geometry, so this enum is used to give the user the opportunity to adjust more concrete dimensions of the hexagons without having to pull out a calculator to calculate all the square roots and complicated conversion factors.
This field is only used in the graph inspector, the nodeSize field will always use the same internal units. If you want to set the node size through code then you can use ConvertHexagonSizeToNodeSize.

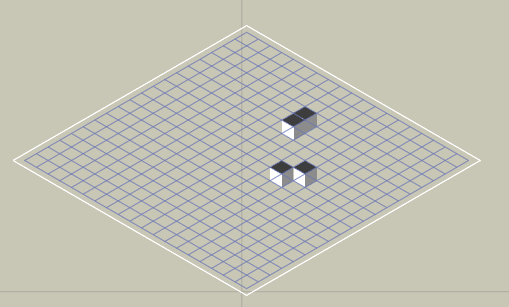
◆ isometricAngle
| float isometricAngle |
Angle to use for the isometric projection.
If you are making a 2D isometric game, you may want to use this parameter to adjust the layout of the graph to match your game. This will essentially scale the graph along one of its diagonals to produce something like this:
A perspective view of an isometric graph.
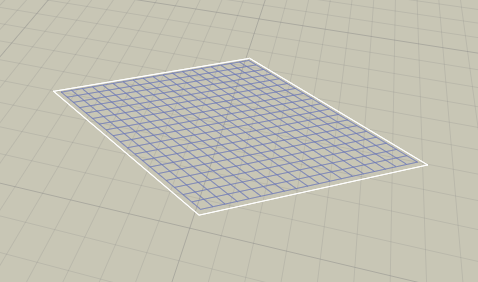
A top down view of an isometric graph. Note that the graph is entirely 2D, there is no perspective in this image.
Usually the angle that you want to use is either 30 degrees (alternatively 90-30 = 60 degrees) or atan(1/sqrt(2)) which is approximately 35.264 degrees (alternatively 90 - 35.264 = 54.736 degrees). You might also want to rotate the graph plus or minus 45 degrees around the Y axis to get the oritientation required for your game.
You can read more about it on the wikipedia page linked below.
◆ maxSlope
| float maxSlope = 90 |
The max slope in degrees for a node to be walkable.
◆ maxStepHeight
| float maxStepHeight = 0.4F |
The max y coordinate difference between two nodes to enable a connection.
Set to 0 to ignore the value.
This affects for example how the graph is generated around ledges and stairs.
- See also
- maxStepUsesSlope
- Version
- Was previously called maxClimb
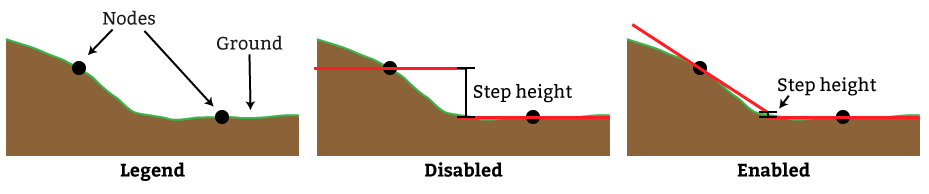
◆ maxStepUsesSlope
| bool maxStepUsesSlope = true |
Take the slope into account for maxClimb.
When this is enabled the normals of the terrain will be used to make more accurate estimates of how large the steps are between adjacent nodes.
When this is disabled then calculated step between two nodes is their y coordinate difference. This may be inaccurate, especially at the start of steep slopes.
In the image below you can see an example of what happens near a ramp. In the topmost image the ramp is not connected with the rest of the graph which is obviously not what we want. In the middle image an attempt has been made to raise the max step height while keeping maxStepUsesSlope disabled. However this causes too many connections to be added. The agent should not be able to go up the ramp from the side. Finally in the bottommost image the maxStepHeight has been restored to the original value but maxStepUsesSlope has been enabled. This configuration handles the ramp in a much smarter way. Note that all the values in the image are just example values, they may be different for your scene.
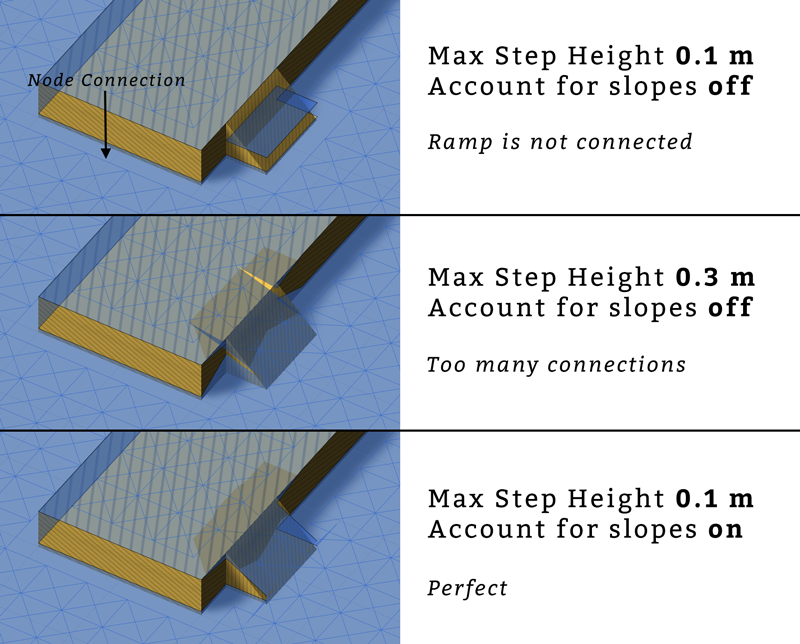
- See also
- maxStepHeight
◆ neighbourCosts
| readonly uint [] neighbourCosts = new uint[8] |
Costs to neighbour nodes.
◆ neighbourOffsets
| readonly int [] neighbourOffsets = new int[8] |
Index offset to get neighbour nodes.
Added to a node's index to get a neighbour node index.
◆ neighbours
| NumNeighbours neighbours = NumNeighbours.Eight |
Number of neighbours for each node.
Either four, six, eight connections per node.
Six connections is primarily for emulating hexagon graphs.
◆ neighbourXOffsets
|
static |
Offsets in the X direction for neighbour nodes.
Only 1, 0 or -1
◆ neighbourZOffsets
|
static |
Offsets in the Z direction for neighbour nodes.
Only 1, 0 or -1
◆ nodes
| GridNode [] nodes |
All nodes in this graph.
Nodes are laid out row by row.
The first node has grid coordinates X=0, Z=0, the second one X=1, Z=0
the last one has grid coordinates X=width-1, Z=depth-1.
◆ nodeSize
| float nodeSize = 1 |
Size of one node in world units.
- See also
- SetDimensions
◆ penaltyAngle
| bool penaltyAngle |
◆ penaltyAngleFactor
| float penaltyAngleFactor = 100F |
How much penalty is applied depending on the slope of the terrain.
At a 90 degree slope (not that exactly 90 degree slopes can occur, but almost 90 degree), this penalty is applied. At a 45 degree slope, half of this is applied and so on. Note that you may require very large values, a value of 1000 is equivalent to the cost of moving 1 world unit.
◆ penaltyAnglePower
| float penaltyAnglePower = 1 |
How much extra to penalize very steep angles.
◆ penaltyPosition
| bool penaltyPosition |
Use position (y-coordinate) to calculate penalty.
◆ penaltyPositionFactor
| float penaltyPositionFactor = 1F |
Scale factor for penalty when calculating from position.
- See also
- penaltyPosition
◆ penaltyPositionOffset
| float penaltyPositionOffset |
Offset for the position when calculating penalty.
- See also
- penaltyPosition
◆ rotation
| Vector3 rotation |
Rotation of the grid in degrees.
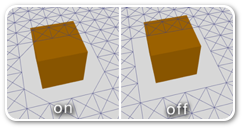
◆ showMeshOutline
| bool showMeshOutline = true |
Show an outline of the grid nodes in the Unity Editor.
◆ showMeshSurface
| bool showMeshSurface = true |
Show the surface of the graph.
Each node will be drawn as a square (unless e.g hexagon graph mode has been enabled).
◆ showNodeConnections
| bool showNodeConnections |
Show the connections between the grid nodes in the Unity Editor.
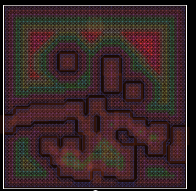
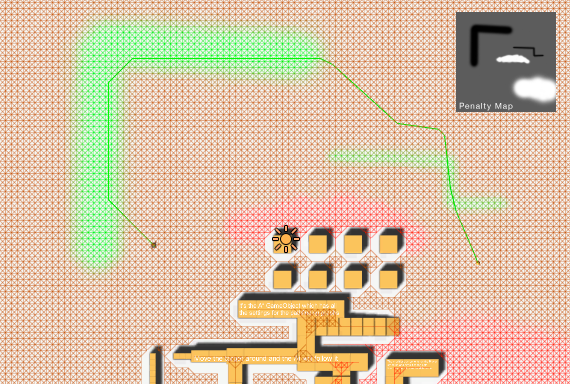
◆ textureData
| TextureData textureData = new TextureData() |
Holds settings for using a texture as source for a grid graph.
Texure data can be used for fine grained control over how the graph will look. It can be used for positioning, penalty and walkability control.
Below is a screenshot of a grid graph with a penalty map applied. It has the effect of the AI taking the longer path along the green (low penalty) areas.
- A* Pro Feature:
- This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited
The Pro version can be bought here
- Warning
- Can only be used with Unity 3.4 and up
◆ unclampedSize
| Vector2 unclampedSize |
Size of the grid.
Might be negative or smaller than nodeSize
◆ uniformEdgeCosts
| bool uniformEdgeCosts |
If true, all edge costs will be set to the same value.
If false, diagonals will cost more. This is useful for a hexagon graph where the diagonals are actually the same length as the normal edges (since the graph has been skewed)
◆ USE_BURST
|
static |
◆ USE_BURST_UPDATE
|
static |
◆ useJumpPointSearch
| bool useJumpPointSearch |
Use jump point search to speed up pathfinding.
Jump point search can improve pathfinding performance significantly by making use of some assumptions of the graph. More specifically it assumes a grid graph with no penalties.
◆ width
| int width |
Width of the grid in nodes.
- See also
- SetDimensions
Property Documentation
◆ Depth
|
getset |
◆ LayerCount
|
get |
Number of layers in the graph.
For grid graphs this is always 1, for layered grid graphs it can be higher. The nodes array has the size width*depth*layerCount.
◆ maxClimb
|
getset |
The max y coordinate difference between two nodes to enable a connection.
- Deprecated:
- This field has been renamed to maxStepHeight
◆ size
|
getprotected set |
◆ transform
|
getprivate set |
Determines how the graph transforms graph space to world space.
- See also
- UpdateTransform
◆ uniformWidthDepthGrid
|
get |
This is placed here so generators inheriting from this one can override it and set it to false.
If it is true, it means that the nodes array's length will always be equal to width*depth It is used mainly in the editor to do auto-scanning calls, setting it to false for a non-uniform grid will reduce the number of scans
◆ useRaycastNormal
|
getprotected |
Use heigh raycasting normal for max slope calculation.
True if maxSlope is less than 90 degrees.
◆ Width
|
getset |
The documentation for this class was generated from the following file:
- /Users/arong/Unity/a-pathfinding-project/Assets/AstarPathfindingProject/Generators/GridGenerator.cs
