Class RVOSimulator Extends VersionedMonoBehaviour
Unity front end for an RVO simulator.
Attached to any GameObject in a scene, scripts such as the RVOController will use the simulator exposed by this class to handle their movement. In pretty much all cases you should only have a single RVOSimulator in the scene.
You can have more than one of these, however most scripts which make use of the RVOSimulator will use the active property which just returns the first simulator in the scene.
This is only a wrapper class for a Pathfinding.RVO.Simulator which simplifies exposing it for a unity scene.
A* Pro Feature:
This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited.
The Pro version can be bought here
Public Methods
Get the internal simulator.
Public Variables
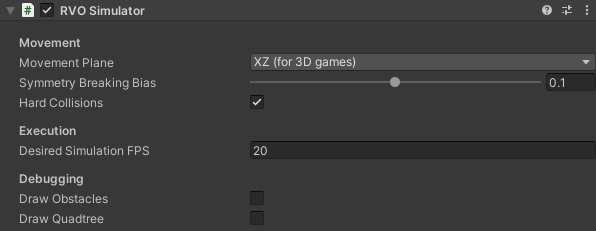
Desired FPS for rvo simulation.
Prevent agent overlap more aggressively.
Determines if the XY (2D) or XZ (3D) plane is used for movement.
Bias agents to pass each other on the right side.
Allows the local avoidance system to take the edges of the navmesh into account.
Public Static Variables
Private/Protected Members
Handle serialization backwards compatibility.
Handle serialization backwards compatibility.
Update the simulation.
Reference to the internal simulator.
Deprecated Members
Calculate local avoidance in between frames.