Core component for the A* Pathfinding System. More...
Detailed Description
Core component for the A* Pathfinding System.
This class handles all of the pathfinding system, calculates all paths and stores the info.
This class is a singleton class, meaning there should only exist at most one active instance of it in the scene.
It might be a bit hard to use directly, usually interfacing with the pathfinding system is done through the Seeker class.
- Examples:
- CircuitBoardExample.cs, and MultiTargetFree.cs.
Public Types | |
| enum | AstarDistribution { WebsiteDownload, AssetStore } |
| Information about where the package was downloaded. More... | |
Public Member Functions | |
| void | AddWorkItem (System.Action callback) |
| Add a work item to be processed when pathfinding is paused. More... | |
| void | AddWorkItem (System.Action< IWorkItemContext > callback) |
| Add a work item to be processed when pathfinding is paused. More... | |
| void | AddWorkItem (AstarWorkItem item) |
| Add a work item to be processed when pathfinding is paused. More... | |
| void | BlockUntilPathQueueBlocked () |
| Blocks until all pathfinding threads are paused and blocked. More... | |
| void | EnsureValidFloodFill () |
| If a WorkItem needs to have a valid flood fill during execution, call this method to ensure there are no pending flood fills. More... | |
| void | FloodFill (GraphNode seed) |
| Floodfills starting from the specified node. More... | |
| void | FloodFill (GraphNode seed, uint area) |
| Floodfills starting from 'seed' using the specified area. More... | |
| void | FloodFill () |
| Floodfills all graphs and updates areas for every node. More... | |
| void | FlushGraphUpdates () |
| Forces graph updates to complete in a single frame. More... | |
| void | FlushThreadSafeCallbacks () |
| Forces thread safe callbacks to run. More... | |
| void | FlushWorkItems () |
| Forces work items to complete in a single frame. More... | |
| void | FlushWorkItems (bool unblockOnComplete, bool block) |
| Make sure work items are executed. More... | |
| NNInfo | GetNearest (Vector3 position) |
| Returns the nearest node to a position using the specified NNConstraint. More... | |
| NNInfo | GetNearest (Vector3 position, NNConstraint constraint) |
| Returns the nearest node to a position using the specified NNConstraint. More... | |
| NNInfo | GetNearest (Vector3 position, NNConstraint constraint, GraphNode hint) |
| Returns the nearest node to a position using the specified NNConstraint. More... | |
| GraphNode | GetNearest (Ray ray) |
| Returns the node closest to the ray (slow). More... | |
| string [] | GetTagNames () |
| Returns tag names. More... | |
| PathProcessor.GraphUpdateLock | PausePathfinding () |
| Blocks until all pathfinding threads are paused and blocked. More... | |
| void | QueueGraphUpdates () |
| Will apply queued graph updates as soon as possible, regardless of batchGraphUpdates. More... | |
| void | QueueWorkItemFloodFill () |
| Call during work items to queue a flood fill. More... | |
| void | Scan (NavGraph graphToScan) |
| Scans a particular graph. More... | |
| void | Scan (NavGraph[] graphsToScan=null) |
| Scans all specified graphs. More... | |
| IEnumerable< Progress > | ScanAsync (NavGraph graphToScan) |
| Scans a particular graph asynchronously. More... | |
| IEnumerable< Progress > | ScanAsync (NavGraph[] graphsToScan=null) |
| Scans all specified graphs asynchronously. More... | |
| void | ScanLoop (OnScanStatus statusCallback) |
| Scans all graphs. More... | |
| void | UpdateGraphs (Bounds bounds, float delay) |
| Update all graphs within bounds after delay seconds. More... | |
| void | UpdateGraphs (GraphUpdateObject ob, float delay) |
| Update all graphs using the GraphUpdateObject after delay seconds. More... | |
| void | UpdateGraphs (Bounds bounds) |
| Update all graphs within bounds. More... | |
| void | UpdateGraphs (GraphUpdateObject ob) |
| Update all graphs using the GraphUpdateObject. More... | |
Static Public Member Functions | |
| static void | BlockUntilCalculated (Path path) |
| Blocks until the path has been calculated. More... | |
| static int | CalculateThreadCount (ThreadCount count) |
| Calculates number of threads to use. More... | |
| static void | FindAstarPath () |
| Used outside of play mode to initialize the AstarPath object even if it has not been selected in the inspector yet. More... | |
| static string [] | FindTagNames () |
| Tries to find an AstarPath object and return tag names. More... | |
| static void | RegisterSafeUpdate (System.Action callback, bool threadSafe) |
| Will send a callback when it is safe to update nodes. More... | |
| static void | RegisterSafeUpdate (System.Action callback) |
| Will send a callback when it is safe to update nodes. More... | |
| static void | StartPath (Path path, bool pushToFront=false) |
| Adds the path to a queue so that it will be calculated as soon as possible. More... | |
| static void | WaitForPath (Path path) |
| Wait for the specified path to be calculated. More... | |
Public Attributes | |
| AstarData | data |
| Holds all graph data. More... | |
| EuclideanEmbedding | euclideanEmbedding = new EuclideanEmbedding() |
| Holds settings for heuristic optimization. More... | |
| bool | showGraphs = false |
| Shows or hides graph inspectors. More... | |
Static Public Attributes | |
| static AstarPath | active |
| Returns the active AstarPath object in the scene. More... | |
| static readonly string | Branch = "master_Pro" |
| Which branch of the A* Pathfinding Project is this release. More... | |
| static readonly AstarDistribution | Distribution = AstarDistribution.WebsiteDownload |
| Used by the editor to guide the user to the correct place to download updates. More... | |
| static readonly System.Version | Version = new System.Version(4, 1, 12) |
| The version number for the A* Pathfinding Project. More... | |
Protected Member Functions | |
| override void | Awake () |
| Sets up all needed variables and scans the graphs. More... | |
 Protected Member Functions inherited from VersionedMonoBehaviour Protected Member Functions inherited from VersionedMonoBehaviour | |
| virtual int | OnUpgradeSerializedData (int version, bool unityThread) |
| Handle serialization backwards compatibility. More... | |
Package Functions | |
| void | DestroyNode (GraphNode node) |
| Internal method to destroy a given node. More... | |
| int | GetNewNodeIndex () |
| Returns a new global node index. More... | |
| ushort | GetNextPathID () |
| Returns the next free path ID. More... | |
| void | InitializeNode (GraphNode node) |
| Initializes temporary path data for a node. More... | |
| void | VerifyIntegrity () |
| Does simple error checking. More... | |
Package Attributes | |
| readonly PathReturnQueue | pathReturnQueue |
| Holds all completed paths waiting to be returned to where they were requested. More... | |
Properties | |
| AstarData | astarData [get] |
| Holds all graph data. More... | |
| NavGraph [] | graphs [get] |
| Shortcut to Pathfinding.AstarData.graphs. More... | |
| System.Type [] | graphTypes [get] |
| See Pathfinding.AstarData. More... | |
| bool | IsAnyGraphUpdateInProgress [get] |
| Returns if any graph updates are being calculated right now. More... | |
| bool | IsAnyGraphUpdateQueued [get] |
| Returns if any graph updates are waiting to be applied. More... | |
| bool | IsAnyGraphUpdatesQueued [get] |
| Returns if any graph updates are waiting to be applied. More... | |
| bool | IsAnyWorkItemInProgress [get] |
| Returns if any work items are in progress right now. More... | |
| bool | IsInsideWorkItem [get] |
| Returns if this code is currently being exectuted inside a work item. More... | |
| bool | isScanning [get, private set] |
| Set while any graphs are being scanned. More... | |
| bool | IsUsingMultithreading [get] |
| Returns whether or not multithreading is used. More... | |
| int | NumParallelThreads [get] |
| Number of parallel pathfinders. More... | |
Private Member Functions | |
| AstarPath () | |
| IEnumerator | DelayedGraphUpdate () |
| Waits a moment with updating graphs. More... | |
| void | InitializeAstarData () |
| Initializes the AstarData class. More... | |
| void | InitializePathProcessor () |
| Initializes the pathProcessor field. More... | |
| void | InitializeProfiler () |
| Calls AstarProfiler.InitializeFastProfile. More... | |
| void | LogPathResults (Path path) |
| Prints path results to the log. More... | |
| void | OnApplicationQuit () |
| Terminates pathfinding threads when the application quits. More... | |
| void | OnDestroy () |
| Clears up variables and other stuff, destroys graphs. More... | |
| void | OnDisable () |
| Cleans up meshes to avoid memory leaks. More... | |
| void | OnDrawGizmos () |
| Calls OnDrawGizmos on graph generators. More... | |
| void | OnGUI () |
| Draws the InGame debugging (if enabled), also shows the fps if 'L' is pressed down. More... | |
| PathProcessor.GraphUpdateLock | PausePathfindingSoon () |
| Blocks the path queue so that e.g work items can be performed. More... | |
| void | PerformBlockingActions (bool force=false) |
| void | RecalculateDebugLimits () |
| IEnumerable< Progress > | ScanGraph (NavGraph graph) |
| void | Update () |
| Checks if any work items need to be executed then runs pathfinding for a while (if not using multithreading because then the calculation happens in other threads) and then returns any calculated paths to the scripts that requested them. More... | |
| IEnumerator | UpdateGraphsInternal (GraphUpdateObject ob, float delay) |
| Update all graphs using the GraphUpdateObject after delay seconds. More... | |
Private Attributes | |
| Pathfinding.Util.RetainedGizmos | gizmos = new Pathfinding.Util.RetainedGizmos() |
| bool | graphUpdateRoutineRunning = false |
| readonly GraphUpdateProcessor | graphUpdates |
| Processes graph updates. More... | |
| bool | graphUpdatesWorkItemAdded = false |
| Makes sure QueueGraphUpdates will not queue multiple graph update orders. More... | |
| bool | isScanningBacking |
| Backing field for isScanning. More... | |
| float | lastGraphUpdate = -9999F |
| Time the last graph update was done. More... | |
| ushort | nextFreePathID = 1 |
| The next unused Path ID. More... | |
| PathProcessor | pathProcessor |
| Holds all paths waiting to be calculated and calculates them. More... | |
| PathProcessor.GraphUpdateLock | workItemLock |
| Held if any work items are currently queued. More... | |
| readonly WorkItemProcessor | workItems |
| Processes work items. More... | |
Static Private Attributes | |
| static int | waitForPathDepth = 0 |
Inspector - Debug | |
| bool | showNavGraphs = true |
| Toggle for showing the gizmo debugging for the graphs in the scene view (editor only). More... | |
| bool | showUnwalkableNodes = true |
| Toggle to show unwalkable nodes. More... | |
| GraphDebugMode | debugMode |
| The mode to use for drawing nodes in the sceneview. More... | |
| float | debugFloor = 0 |
| Low value to use for certain debugMode modes. More... | |
| float | debugRoof = 20000 |
| High value to use for certain debugMode modes. More... | |
| bool | manualDebugFloorRoof = false |
| If set, the debugFloor and debugRoof values will not be automatically recalculated. More... | |
| bool | showSearchTree = false |
| If enabled, nodes will draw a line to their 'parent'. More... | |
| float | unwalkableNodeDebugSize = 0.3F |
| Size of the red cubes shown in place of unwalkable nodes. More... | |
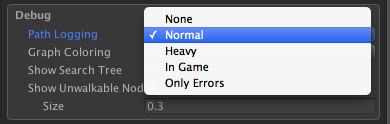
| PathLog | logPathResults = PathLog.Normal |
| The amount of debugging messages. More... | |
Inspector - Settings | |
| float | maxNearestNodeDistanceSqr [get] |
| Max Nearest Node Distance Squared. More... | |
| bool | limitGraphUpdates [get, set] |
| Batch graph updates. More... | |
| float | maxGraphUpdateFreq [get, set] |
| Limit for how often should graphs be updated. More... | |
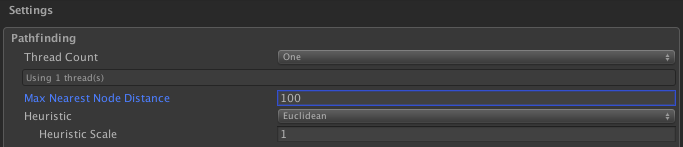
| float | maxNearestNodeDistance = 100 |
| Maximum distance to search for nodes. More... | |
| bool | scanOnStartup = true |
| If true, all graphs will be scanned during Awake. More... | |
| bool | fullGetNearestSearch = false |
| Do a full GetNearest search for all graphs. More... | |
| bool | prioritizeGraphs = false |
| Prioritize graphs. More... | |
| float | prioritizeGraphsLimit = 1F |
| Distance limit for prioritizeGraphs. More... | |
| AstarColor | colorSettings |
| Reference to the color settings for this AstarPath object. More... | |
| Heuristic | heuristic = Heuristic.Euclidean |
| The distance function to use as a heuristic. More... | |
| float | heuristicScale = 1F |
| The scale of the heuristic. More... | |
| ThreadCount | threadCount = ThreadCount.One |
| Number of pathfinding threads to use. More... | |
| float | maxFrameTime = 1F |
| Max number of milliseconds to spend each frame for pathfinding. More... | |
| int | minAreaSize = 0 |
| Defines the minimum amount of nodes in an area. More... | |
| bool | batchGraphUpdates = false |
| Throttle graph updates and batch them to improve performance. More... | |
| float | graphUpdateBatchingInterval = 0.2F |
| Minimum number of seconds between each batch of graph updates. More... | |
| string [] | tagNames = null |
| Stored tag names. More... | |
Debug Members | |
| float | lastScanTime [get, private set] |
| The time it took for the last call to Scan() to complete. More... | |
| PathHandler | debugPathData |
| The path to debug using gizmos. More... | |
| ushort | debugPathID |
| The path ID to debug using gizmos. More... | |
| string | inGameDebugPath |
| Debug string from the last completed path. More... | |
Callbacks | |
| static System.Action | OnAwakeSettings |
| Called on Awake before anything else is done. More... | |
| static OnGraphDelegate | OnGraphPreScan |
| Called for each graph before they are scanned. More... | |
| static OnGraphDelegate | OnGraphPostScan |
| Called for each graph after they have been scanned. More... | |
| static OnPathDelegate | OnPathPreSearch |
| Called for each path before searching. More... | |
| static OnPathDelegate | OnPathPostSearch |
| Called for each path after searching. More... | |
| static OnScanDelegate | OnPreScan |
| Called before starting the scanning. More... | |
| static OnScanDelegate | OnPostScan |
| Called after scanning. More... | |
| static OnScanDelegate | OnLatePostScan |
| Called after scanning has completed fully. More... | |
| static OnScanDelegate | OnGraphsUpdated |
| Called when any graphs are updated. More... | |
| static System.Action | On65KOverflow |
| Called when pathID overflows 65536 and resets back to zero. More... | |
| System.Action | OnGraphsWillBeUpdated |
| System.Action | OnGraphsWillBeUpdated2 |
Member Enumeration Documentation
◆ AstarDistribution
|
strong |
Constructor & Destructor Documentation
◆ AstarPath()
|
private |
Member Function Documentation
◆ AddWorkItem() [1/3]
| void AddWorkItem | ( | System.Action | callback | ) |
Add a work item to be processed when pathfinding is paused.
Convenience method that is equivalent to
- See also
- AddWorkItem(AstarWorkItem)
◆ AddWorkItem() [2/3]
| void AddWorkItem | ( | System.Action< IWorkItemContext > | callback | ) |
Add a work item to be processed when pathfinding is paused.
Convenience method that is equivalent to
- See also
- AddWorkItem(AstarWorkItem)
◆ AddWorkItem() [3/3]
| void AddWorkItem | ( | AstarWorkItem | item | ) |
Add a work item to be processed when pathfinding is paused.
The work item will be executed when it is safe to update nodes. This is defined as between the path searches. When using more threads than one, calling this often might decrease pathfinding performance due to a lot of idling in the threads. Not performance as in it will use much CPU power, but performance as in the number of paths per second will probably go down (though your framerate might actually increase a tiny bit).
You should only call this function from the main unity thread (i.e normal game code).
- See also
- FlushWorkItems
◆ Awake()
|
protectedvirtual |
Sets up all needed variables and scans the graphs.
Calls Initialize, starts the ReturnPaths coroutine and scans all graphs. Also starts threads if using multithreading
- See also
- OnAwakeSettings
Reimplemented from VersionedMonoBehaviour.
◆ BlockUntilCalculated()
|
static |
Blocks until the path has been calculated.
- Parameters
-
path The path to wait for. The path must be started, otherwise an exception will be thrown.
Normally it takes a few frames for a path to be calculated and returned. This function will ensure that the path will be calculated when this function returns and that the callback for that path has been called.
If requesting a lot of paths in one go and waiting for the last one to complete, it will calculate most of the paths in the queue (only most if using multithreading, all if not using multithreading).
Use this function only if you really need to. There is a point to spreading path calculations out over several frames. It smoothes out the framerate and makes sure requesting a large number of paths at the same time does not cause lag.
- Note
- Graph updates and other callbacks might get called during the execution of this function.
When the pathfinder is shutting down. I.e in OnDestroy, this function will not do anything.
- Exceptions
-
Exception if pathfinding is not initialized properly for this scene (most likely no AstarPath object exists) or if the path has not been started yet. Also throws an exception if critical errors occur such as when the pathfinding threads have crashed (which should not happen in normal cases). This prevents an infinite loop while waiting for the path.
◆ BlockUntilPathQueueBlocked()
| void BlockUntilPathQueueBlocked | ( | ) |
Blocks until all pathfinding threads are paused and blocked.
- Deprecated:
- Use PausePathfinding instead. Make sure to call Release on the returned lock.
◆ CalculateThreadCount()
|
static |
Calculates number of threads to use.
If count is not Automatic, simply returns count casted to an int.
- Returns
- An int specifying how many threads to use, 0 means a coroutine should be used for pathfinding instead of a separate thread.
If count is set to Automatic it will return a value based on the number of processors and memory for the current system. If memory is <= 512MB or logical cores are <= 1, it will return 0. If memory is <= 1024 it will clamp threads to max 2. Otherwise it will return the number of logical cores clamped to 6.
When running on WebGL this method always returns 0
◆ DelayedGraphUpdate()
|
private |
Waits a moment with updating graphs.
If batchGraphUpdates is set, we want to keep some space between them to let pathfinding threads running and then calculate all queued calls at once
◆ DestroyNode()
|
package |
Internal method to destroy a given node.
This is to be called after the node has been disconnected from the graph so that it cannot be reached from any other nodes. It should only be called during graph updates, that is when the pathfinding threads are either not running or paused.
- Warning
- This method should not be called by user code. It is used internally by the system.
◆ EnsureValidFloodFill()
| void EnsureValidFloodFill | ( | ) |
If a WorkItem needs to have a valid flood fill during execution, call this method to ensure there are no pending flood fills.
- Deprecated:
- This method has been moved. Use the method on the context object that can be sent with work item delegates instead node.Walkable = false;ctx.QueueFloodFill();}));
- See also
- Pathfinding.IWorkItemContext
◆ FindAstarPath()
|
static |
Used outside of play mode to initialize the AstarPath object even if it has not been selected in the inspector yet.
This will set the active property and deserialize all graphs.
This is useful if you want to do changes to the graphs in the editor outside of play mode, but cannot be sure that the graphs have been deserialized yet. In play mode this method does nothing.
◆ FindTagNames()
|
static |
Tries to find an AstarPath object and return tag names.
If an AstarPath object cannot be found, it returns an array of length 1 with an error message.
- See also
- AstarPath.GetTagNames
◆ FloodFill() [1/3]
| void FloodFill | ( | GraphNode | seed | ) |
Floodfills starting from the specified node.
◆ FloodFill() [2/3]
| void FloodFill | ( | GraphNode | seed, |
| uint | area | ||
| ) |
Floodfills starting from 'seed' using the specified area.
◆ FloodFill() [3/3]
| void FloodFill | ( | ) |
Floodfills all graphs and updates areas for every node.
The different colored areas that you see in the scene view when looking at graphs are called just 'areas', this method calculates which nodes are in what areas.
- See also
- Pathfinding.Node.area
◆ FlushGraphUpdates()
| void FlushGraphUpdates | ( | ) |
Forces graph updates to complete in a single frame.
This will force the pathfinding threads to finish calculating the path they are currently calculating (if any) and then pause. When all threads have paused, graph updates will be performed.
- Warning
- Using this very often (many times per second) can reduce your fps due to a lot of threads waiting for one another. But you probably wont have to worry about that.
- Note
- This is almost identical to FlushWorkItems, but added for more descriptive name. This function will also override any time limit delays for graph updates. This is because graph updates are implemented using work items. So calling this function will also execute any other work items (if any are queued).
Will not do anything if there are no graph updates queued (not even execute other work items).
◆ FlushThreadSafeCallbacks()
| void FlushThreadSafeCallbacks | ( | ) |
Forces thread safe callbacks to run.
- Deprecated:
- Use FlushWorkItems instead
◆ FlushWorkItems() [1/2]
| void FlushWorkItems | ( | ) |
Forces work items to complete in a single frame.
This will force all work items to run immidiately. This will force the pathfinding threads to finish calculating the path they are currently calculating (if any) and then pause. When all threads have paused, work items will be executed (which can be e.g graph updates).
- Warning
- Using this very often (many times per second) can reduce your fps due to a lot of threads waiting for one another. But you probably wont have to worry about that
- Note
- This is almost (note almost) identical to FlushGraphUpdates, but added for more descriptive name.
Will not do anything if there are no queued work items waiting to run.
◆ FlushWorkItems() [2/2]
| void FlushWorkItems | ( | bool | unblockOnComplete, |
| bool | block | ||
| ) |
Make sure work items are executed.
- Parameters
-
unblockOnComplete If true, pathfinding will be allowed to start running immediately after completing all work items. block If true, work items that usually take more than one frame to complete will be forced to complete during this call. If false, then after this call there might still be work left to do.
- See also
- AddWorkItem
- Deprecated:
- Use FlushWorkItems() instead.
◆ GetNearest() [1/4]
| NNInfo GetNearest | ( | Vector3 | position | ) |
Returns the nearest node to a position using the specified NNConstraint.
Searches through all graphs for their nearest nodes to the specified position and picks the closest one.
Using the NNConstraint.None constraint.
- See also
- Pathfinding.NNConstraint
◆ GetNearest() [2/4]
| NNInfo GetNearest | ( | Vector3 | position, |
| NNConstraint | constraint | ||
| ) |
Returns the nearest node to a position using the specified NNConstraint.
Searches through all graphs for their nearest nodes to the specified position and picks the closest one. The NNConstraint can be used to specify constraints on which nodes can be chosen such as only picking walkable nodes.
- See also
- Pathfinding.NNConstraint
◆ GetNearest() [3/4]
| NNInfo GetNearest | ( | Vector3 | position, |
| NNConstraint | constraint, | ||
| GraphNode | hint | ||
| ) |
Returns the nearest node to a position using the specified NNConstraint.
Searches through all graphs for their nearest nodes to the specified position and picks the closest one. The NNConstraint can be used to specify constraints on which nodes can be chosen such as only picking walkable nodes.
- See also
- Pathfinding.NNConstraint
◆ GetNearest() [4/4]
| GraphNode GetNearest | ( | Ray | ray | ) |
Returns the node closest to the ray (slow).
- Warning
- This function is brute-force and very slow, use with caution
◆ GetNewNodeIndex()
|
package |
Returns a new global node index.
- Warning
- This method should not be called directly. It is used by the GraphNode constructor.
◆ GetNextPathID()
|
package |
Returns the next free path ID.
◆ GetTagNames()
| string [] GetTagNames | ( | ) |
Returns tag names.
Makes sure that the tag names array is not null and of length 32. If it is null or not of length 32, it creates a new array and fills it with 0,1,2,3,4 etc...
- See also
- AstarPath.FindTagNames
◆ InitializeAstarData()
|
private |
Initializes the AstarData class.
Searches for graph types, calls Awake on data and on all graphs
- See also
- AstarData.FindGraphTypes
◆ InitializeNode()
|
package |
Initializes temporary path data for a node.
- Warning
- This method should not be called directly. It is used by the GraphNode constructor.
◆ InitializePathProcessor()
|
private |
Initializes the pathProcessor field.
◆ InitializeProfiler()
|
private |
Calls AstarProfiler.InitializeFastProfile.
◆ LogPathResults()
|
private |
Prints path results to the log.
What it prints can be controled using logPathResults.
- See also
- logPathResults
- PathLog
- Pathfinding.Path.DebugString
◆ OnApplicationQuit()
|
private |
Terminates pathfinding threads when the application quits.
◆ OnDestroy()
|
private |
Clears up variables and other stuff, destroys graphs.
Note that when destroying an AstarPath object, all static variables such as callbacks will be cleared.
◆ OnDisable()
|
private |
Cleans up meshes to avoid memory leaks.
◆ OnDrawGizmos()
|
private |
Calls OnDrawGizmos on graph generators.
◆ OnGUI()
|
private |
Draws the InGame debugging (if enabled), also shows the fps if 'L' is pressed down.
- See also
- logPathResults PathLog
◆ PausePathfinding()
| PathProcessor.GraphUpdateLock PausePathfinding | ( | ) |
Blocks until all pathfinding threads are paused and blocked.
- Returns
- A lock object. You need to call Release on that object to allow pathfinding to resume.
- Note
- In most cases this should not be called from user code. Use the AddWorkItem method instead.
- See also
- AddWorkItem
◆ PausePathfindingSoon()
|
private |
Blocks the path queue so that e.g work items can be performed.
◆ PerformBlockingActions()
|
private |
◆ QueueGraphUpdates()
| void QueueGraphUpdates | ( | ) |
Will apply queued graph updates as soon as possible, regardless of batchGraphUpdates.
Calling this multiple times will not create multiple callbacks. This function is useful if you are limiting graph updates, but you want a specific graph update to be applied as soon as possible regardless of the time limit. Note that this does not block until the updates are done, it merely bypasses the batchGraphUpdates time limit.
- See also
- FlushGraphUpdates
◆ QueueWorkItemFloodFill()
| void QueueWorkItemFloodFill | ( | ) |
Call during work items to queue a flood fill.
- Deprecated:
- This method has been moved. Use the method on the context object that can be sent with work item delegates instead node.Walkable = false;ctx.QueueFloodFill();}));
- See also
- Pathfinding.IWorkItemContext
◆ RecalculateDebugLimits()
|
private |
◆ RegisterSafeUpdate() [1/2]
|
static |
Will send a callback when it is safe to update nodes.
This is defined as between the path searches. This callback will only be sent once and is nulled directly after the callback has been sent. When using more threads than one, calling this often might decrease pathfinding performance due to a lot of idling in the threads. Not performance as in it will use much CPU power, but performance as in the number of paths per second will probably go down (though your framerate might actually increase a tiny bit)
You should only call this function from the main unity thread (i.e normal game code).
- Note
- The threadSafe parameter has been deprecated
◆ RegisterSafeUpdate() [2/2]
|
static |
Will send a callback when it is safe to update nodes.
This is defined as between the path searches. This callback will only be sent once and is nulled directly after the callback has been sent. When using more threads than one, calling this often might decrease pathfinding performance due to a lot of idling in the threads. Not performance as in it will use much CPU power, but performance as in the number of paths per second will probably go down (though your framerate might actually increase a tiny bit)
You should only call this function from the main unity thread (i.e normal game code).
- Version
- Since version 4.0 this is equivalent to AddWorkItem(new AstarWorkItem(callback)). Previously the callbacks added using this method would not be ordered with respect to other work items, so they could be executed before other work items or after them.
- Deprecated:
- Use AddWorkItem(System.Action) instead. Note the slight change in behavior (mentioned above).
◆ Scan() [1/2]
| void Scan | ( | NavGraph | graphToScan | ) |
Scans a particular graph.
Calling this method will recalculate the specified graph. This method is pretty slow (depending on graph type and graph complexity of course), so it is advisable to use smaller graph updates whenever possible.
◆ Scan() [2/2]
| void Scan | ( | NavGraph [] | graphsToScan = null | ) |
Scans all specified graphs.
- Parameters
-
graphsToScan The graphs to scan. If this parameter is null then all graphs will be scanned
Calling this method will recalculate all specified graphs or all graphs if the graphsToScan parameter is null. This method is pretty slow (depending on graph type and graph complexity of course), so it is advisable to use smaller graph updates whenever possible.
◆ ScanAsync() [1/2]
Scans a particular graph asynchronously.
This is a IEnumerable, you can loop through it to get the progress
You can scan graphs asyncronously by yielding when you loop through the progress. Note that this does not guarantee a good framerate, but it will allow you to at least show a progress bar during scanning.
- See also
- Scan
- A* Pro Feature:
- This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited
The Pro version can be bought here
◆ ScanAsync() [2/2]
Scans all specified graphs asynchronously.
This is a IEnumerable, you can loop through it to get the progress
- Parameters
-
graphsToScan The graphs to scan. If this parameter is null then all graphs will be scanned
You can scan graphs asyncronously by yielding when you loop through the progress. Note that this does not guarantee a good framerate, but it will allow you to at least show a progress bar during scanning.
- See also
- Scan
- A* Pro Feature:
- This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited
The Pro version can be bought here
◆ ScanGraph()
◆ ScanLoop()
| void ScanLoop | ( | OnScanStatus | statusCallback | ) |
◆ StartPath()
|
static |
Adds the path to a queue so that it will be calculated as soon as possible.
The callback specified when constructing the path will be called when the path has been calculated. Usually you should use the Seeker component instead of calling this function directly.
- Parameters
-
path The path that should be enqueued. pushToFront If true, the path will be pushed to the front of the queue, bypassing all waiting paths and making it the next path to be calculated. This can be useful if you have a path which you want to prioritize over all others. Be careful to not overuse it though. If too many paths are put in the front of the queue often, this can lead to normal paths having to wait a very long time before being calculated.
- Examples:
- CircuitBoardExample.cs, and MultiTargetFree.cs.
◆ Update()
|
private |
Checks if any work items need to be executed then runs pathfinding for a while (if not using multithreading because then the calculation happens in other threads) and then returns any calculated paths to the scripts that requested them.
- See also
- PerformBlockingActions
- PathProcessor.TickNonMultithreaded
- PathReturnQueue.ReturnPaths
◆ UpdateGraphs() [1/4]
| void UpdateGraphs | ( | Bounds | bounds, |
| float | delay | ||
| ) |
Update all graphs within bounds after delay seconds.
The graphs will be updated as soon as possible.
◆ UpdateGraphs() [2/4]
| void UpdateGraphs | ( | GraphUpdateObject | ob, |
| float | delay | ||
| ) |
Update all graphs using the GraphUpdateObject after delay seconds.
This can be used to, e.g make all nodes in a region unwalkable, or set them to a higher penalty.
◆ UpdateGraphs() [3/4]
| void UpdateGraphs | ( | Bounds | bounds | ) |
Update all graphs within bounds.
The graphs will be updated as soon as possible.
This is equivalent to
◆ UpdateGraphs() [4/4]
| void UpdateGraphs | ( | GraphUpdateObject | ob | ) |
Update all graphs using the GraphUpdateObject.
This can be used to, e.g make all nodes in a region unwalkable, or set them to a higher penalty. The graphs will be updated as soon as possible (with respect to batchGraphUpdates)
◆ UpdateGraphsInternal()
|
private |
Update all graphs using the GraphUpdateObject after delay seconds.
◆ VerifyIntegrity()
|
package |
Does simple error checking.
◆ WaitForPath()
|
static |
Wait for the specified path to be calculated.
Normally it takes a few frames for a path to get calculated and returned.
- Deprecated:
- This method has been renamed to BlockUntilCalculated.
Member Data Documentation
◆ active
|
static |
◆ batchGraphUpdates
| bool batchGraphUpdates = false |
Throttle graph updates and batch them to improve performance.
If toggled, graph updates will batched and executed less often (specified by graphUpdateBatchingInterval).
This can have a positive impact on pathfinding throughput since the pathfinding threads do not need to be stopped as often, and it reduces the overhead per graph update. All graph updates are still applied however, they are just batched together so that more of them are applied at the same time.
However do not use this if you want minimal latency between a graph update being requested and it being applied.
This only applies to graph updates requested using the UpdateGraphs method. Not those requested using RegisterSafeUpdate or AddWorkItem.
- See also
- Graph Updates during Runtime
◆ Branch
|
static |
Which branch of the A* Pathfinding Project is this release.
Used when checking for updates so that users of the development versions can get notifications of development updates.
◆ colorSettings
| AstarColor colorSettings |
Reference to the color settings for this AstarPath object.
Color settings include for example which color the nodes should be in, in the sceneview.
◆ data
| AstarData data |
Holds all graph data.
◆ debugFloor
| float debugFloor = 0 |
◆ debugMode
| GraphDebugMode debugMode |
The mode to use for drawing nodes in the sceneview.
- Note
- Only relevant in the editor
- See also
- Pathfinding.GraphDebugMode
◆ debugPathData
| PathHandler debugPathData |
The path to debug using gizmos.
This is the path handler used to calculate the last path. It is used in the editor to draw debug information using gizmos.
◆ debugPathID
| ushort debugPathID |
The path ID to debug using gizmos.
◆ debugRoof
| float debugRoof = 20000 |
High value to use for certain debugMode modes.
For example if debugMode is set to G, this value will determine when the node will be completely green.
For the penalty debug mode, the nodes will be colored green when they have a penalty less than debugFloor and red when their penalty is greater or equal to this value and something between red and green otherwise.
- Note
- Only relevant in the editor
- See also
- debugFloor
- debugMode
◆ Distribution
|
static |
Used by the editor to guide the user to the correct place to download updates.
◆ euclideanEmbedding
| EuclideanEmbedding euclideanEmbedding = new EuclideanEmbedding() |
Holds settings for heuristic optimization.
- See also
- heuristic-opt
- A* Pro Feature:
- This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited
The Pro version can be bought here
◆ fullGetNearestSearch
| bool fullGetNearestSearch = false |
Do a full GetNearest search for all graphs.
Additional searches will normally only be done on the graph which in the first fast search seemed to have the closest node. With this setting on, additional searches will be done on all graphs since the first check is not always completely accurate.
More technically: GetNearestForce on all graphs will be called if true, otherwise only on the one graph which's GetNearest search returned the best node.
Usually faster when disabled, but higher quality searches when enabled. When using a a navmesh or recast graph, for best quality, this setting should be combined with the Pathfinding.NavMeshGraph.accurateNearestNode setting set to true.
- Note
- For the PointGraph this setting doesn't matter much as it has only one search mode.
◆ gizmos
|
private |
◆ graphUpdateBatchingInterval
| float graphUpdateBatchingInterval = 0.2F |
Minimum number of seconds between each batch of graph updates.
If batchGraphUpdates is true, this defines the minimum number of seconds between each batch of graph updates.
This can have a positive impact on pathfinding throughput since the pathfinding threads do not need to be stopped as often, and it reduces the overhead per graph update. All graph updates are still applied however, they are just batched together so that more of them are applied at the same time.
Do not use this if you want minimal latency between a graph update being requested and it being applied.
This only applies to graph updates requested using the UpdateGraphs method. Not those requested using RegisterSafeUpdate or AddWorkItem.
- See also
- Graph Updates during Runtime
◆ graphUpdateRoutineRunning
|
private |
◆ graphUpdates
|
private |
Processes graph updates.
◆ graphUpdatesWorkItemAdded
|
private |
Makes sure QueueGraphUpdates will not queue multiple graph update orders.
◆ heuristic
| Heuristic heuristic = Heuristic.Euclidean |
The distance function to use as a heuristic.
The heuristic, often referred to as just 'H' is the estimated cost from a node to the target. Different heuristics affect how the path picks which one to follow from multiple possible with the same length
- See also
- Pathfinding.Heuristic for more details and descriptions of the different modes.
- Wikipedia: Admissible heuristic
- Wikipedia: A* search algorithm
- Wikipedia: Dijkstra's Algorithm
◆ heuristicScale
| float heuristicScale = 1F |
The scale of the heuristic.
If a value lower than 1 is used, the pathfinder will search more nodes (slower). If 0 is used, the pathfinding algorithm will be reduced to dijkstra's algorithm. This is equivalent to setting heuristic to None. If a value larger than 1 is used the pathfinding will (usually) be faster because it expands fewer nodes, but the paths may no longer be the optimal (i.e the shortest possible paths).
Usually you should leave this to the default value of 1.
◆ inGameDebugPath
|
private |
Debug string from the last completed path.
Will be updated if logPathResults == PathLog.InGame
◆ isScanningBacking
|
private |
Backing field for isScanning.
Cannot use an auto-property because they cannot be marked with System.NonSerialized.
◆ lastGraphUpdate
|
private |
Time the last graph update was done.
Used to group together frequent graph updates to batches
◆ logPathResults
| PathLog logPathResults = PathLog.Normal |
The amount of debugging messages.
Use less debugging to improve performance (a bit) or just to get rid of the Console spamming. Use more debugging (heavy) if you want more information about what the pathfinding scripts are doing. The InGame option will display the latest path log using in-game GUI.
◆ manualDebugFloorRoof
| bool manualDebugFloorRoof = false |
If set, the debugFloor and debugRoof values will not be automatically recalculated.
- Note
- Only relevant in the editor
◆ maxFrameTime
| float maxFrameTime = 1F |
Max number of milliseconds to spend each frame for pathfinding.
At least 500 nodes will be searched each frame (if there are that many to search). When using multithreading this value is irrelevant.
◆ maxNearestNodeDistance
| float maxNearestNodeDistance = 100 |
Maximum distance to search for nodes.
When searching for the nearest node to a point, this is the limit (in world units) for how far away it is allowed to be.
This is relevant if you try to request a path to a point that cannot be reached and it thus has to search for the closest node to that point which can be reached (which might be far away). If it cannot find a node within this distance then the path will fail.
◆ minAreaSize
| int minAreaSize = 0 |
Defines the minimum amount of nodes in an area.
If an area has less than this amount of nodes, the area will be flood filled again with the area ID GraphNode.MaxAreaIndex-1, it shouldn't affect pathfinding in any significant way.
If you want to be able to separate areas from one another for some reason (for example to do a fast check to see if a path is at all possible) you should set this variable to 0.
- Version
- Since version 3.6, this variable should in most cases be set to 0 since the max number of area indices available has been greatly increased.
- Deprecated:
- This is handled automatically now
◆ nextFreePathID
|
private |
The next unused Path ID.
Incremented for every call to GetNextPathID
◆ On65KOverflow
|
static |
Called when pathID overflows 65536 and resets back to zero.
- Note
- This callback will be cleared every time it is called, so if you want to register to it repeatedly, register to it directly on receiving the callback as well.
◆ OnAwakeSettings
|
static |
Called on Awake before anything else is done.
This is called at the start of the Awake call, right after active has been set, but this is the only thing that has been done.
Use this when you want to set up default settings for an AstarPath component created during runtime since some settings can only be changed in Awake (such as multithreading related stuff)
◆ OnGraphPostScan
|
static |
Called for each graph after they have been scanned.
All other graphs might not have been scanned yet.
◆ OnGraphPreScan
|
static |
Called for each graph before they are scanned.
◆ OnGraphsUpdated
|
static |
Called when any graphs are updated.
Register to for example recalculate the path whenever a graph changes.
◆ OnGraphsWillBeUpdated
| System.Action OnGraphsWillBeUpdated |
◆ OnGraphsWillBeUpdated2
| System.Action OnGraphsWillBeUpdated2 |
◆ OnLatePostScan
|
static |
Called after scanning has completed fully.
This is called as the last thing in the Scan function.
◆ OnPathPostSearch
|
static |
Called for each path after searching.
Be careful when using multithreading since this will be called from a different thread.
◆ OnPathPreSearch
|
static |
Called for each path before searching.
Be careful when using multithreading since this will be called from a different thread.
◆ OnPostScan
|
static |
Called after scanning.
This is called before applying links, flood-filling the graphs and other post processing.
◆ OnPreScan
|
static |
Called before starting the scanning.
◆ pathProcessor
|
private |
Holds all paths waiting to be calculated and calculates them.
◆ pathReturnQueue
|
package |
Holds all completed paths waiting to be returned to where they were requested.
◆ prioritizeGraphs
| bool prioritizeGraphs = false |
Prioritize graphs.
Graphs will be prioritized based on their order in the inspector. The first graph which has a node closer than prioritizeGraphsLimit will be chosen instead of searching all graphs.
◆ prioritizeGraphsLimit
| float prioritizeGraphsLimit = 1F |
Distance limit for prioritizeGraphs.
- See also
- prioritizeGraphs
◆ scanOnStartup
| bool scanOnStartup = true |
If true, all graphs will be scanned during Awake.
This does not include loading from the cache. If you disable this, you will have to call AstarPath.active.Scan() yourself to enable pathfinding. Alternatively you could load a saved graph from a file.
◆ showGraphs
| bool showGraphs = false |
Shows or hides graph inspectors.
Used internally by the editor
◆ showNavGraphs
| bool showNavGraphs = true |
Toggle for showing the gizmo debugging for the graphs in the scene view (editor only).
◆ showSearchTree
| bool showSearchTree = false |
If enabled, nodes will draw a line to their 'parent'.
This will show the search tree for the latest path.
- Note
- Only relevant in the editor
- Todo:
- Add a showOnlyLastPath flag to indicate whether to draw every node or only the ones visited by the latest path.
◆ showUnwalkableNodes
| bool showUnwalkableNodes = true |
◆ tagNames
|
protected |
Stored tag names.
◆ threadCount
| ThreadCount threadCount = ThreadCount.One |
Number of pathfinding threads to use.
Multithreading puts pathfinding in another thread, this is great for performance on 2+ core computers since the framerate will barely be affected by the pathfinding at all.
- None indicates that the pathfinding is run in the Unity thread as a coroutine
- Automatic will try to adjust the number of threads to the number of cores and memory on the computer. Less than 512mb of memory or a single core computer will make it revert to using no multithreading.
It is recommended that you use one of the "Auto" settings that are available. The reason is that even if your computer might be beefy and have 8 cores. Other computers might only be quad core or dual core in which case they will not benefit from more than 1 or 3 threads respectively (you usually want to leave one core for the unity thread). If you use more threads than the number of cores on the computer it is mostly just wasting memory, it will not run any faster. The extra memory usage is not trivially small. Each thread needs to keep a small amount of data for each node in all the graphs. It is not the full graph data but it is proportional to the number of nodes. The automatic settings will inspect the machine it is running on and use that to determine the number of threads so that no memory is wasted.
The exception is if you only have one (or maybe two characters) active at time. Then you should probably just go with one thread always since it is very unlikely that you will need the extra throughput given by more threads. Keep in mind that more threads primarily increases throughput by calculating different paths on different threads, it will not calculate individual paths any faster.
Note that if you are modifying the pathfinding core scripts or if you are directly modifying graph data without using any of the safe wrappers (like AddWorkItem) multithreading can cause strange errors and pathfinding stopping to work if you are not careful. For basic usage (not modding the pathfinding core) it should be safe.
- Note
- WebGL does not support threads at all (since javascript is single-threaded) so no threads will be used on that platform.
- See also
- CalculateThreadCount
- A* Pro Feature:
- This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited
The Pro version can be bought here
◆ unwalkableNodeDebugSize
| float unwalkableNodeDebugSize = 0.3F |
Size of the red cubes shown in place of unwalkable nodes.
- Note
- Only relevant in the editor. Does not apply to grid graphs.
- See also
- showUnwalkableNodes
◆ Version
|
static |
The version number for the A* Pathfinding Project.
◆ waitForPathDepth
|
staticprivate |
◆ workItemLock
|
private |
Held if any work items are currently queued.
◆ workItems
|
private |
Processes work items.
Property Documentation
◆ astarData
|
get |
Holds all graph data.
- Deprecated:
- The 'astarData' field has been renamed to 'data'
◆ graphs
|
get |
Shortcut to Pathfinding.AstarData.graphs.
◆ graphTypes
|
get |
◆ IsAnyGraphUpdateInProgress
|
get |
Returns if any graph updates are being calculated right now.
- Note
- This does *not* includes other types of work items such as navmesh cutting or anything added by RegisterSafeUpdate or AddWorkItem.
- See also
- IsAnyWorkItemInProgress
◆ IsAnyGraphUpdateQueued
|
get |
Returns if any graph updates are waiting to be applied.
- Note
- This is false while the updates are being performed.
- This does *not* includes other types of work items such as navmesh cutting or anything added by RegisterSafeUpdate or AddWorkItem.
◆ IsAnyGraphUpdatesQueued
|
get |
Returns if any graph updates are waiting to be applied.
- Deprecated:
- Use IsAnyGraphUpdateQueued instead
◆ IsAnyWorkItemInProgress
|
get |
Returns if any work items are in progress right now.
- Note
- This includes pretty much all types of graph updates. Such as normal graph updates, navmesh cutting and anything added by RegisterSafeUpdate or AddWorkItem.
◆ IsInsideWorkItem
|
getpackage |
Returns if this code is currently being exectuted inside a work item.
- Note
- This includes pretty much all types of graph updates. Such as normal graph updates, navmesh cutting and anything added by RegisterSafeUpdate or AddWorkItem.
In contrast to IsAnyWorkItemInProgress this is only true when work item code is being executed, it is not true in-between the updates to a work item that takes several frames to complete.
◆ isScanning
|
getprivate set |
Set while any graphs are being scanned.
It will be true up until the FloodFill is done.
- Note
- Not to be confused with graph updates.
Used to better support Graph Update Objects called for example in OnPostScan
◆ IsUsingMultithreading
|
get |
Returns whether or not multithreading is used.
- Exceptions
-
System.Exception Is thrown when it could not be decided if multithreading was used or not. This should not happen if pathfinding is set up correctly.
- Note
- This uses info about if threads are running right now, it does not use info from the settings on the A* object.
◆ lastScanTime
|
getprivate set |
The time it took for the last call to Scan() to complete.
Used to prevent automatically rescanning the graphs too often (editor only)
◆ limitGraphUpdates
|
getset |
Batch graph updates.
- Deprecated:
- This field has been renamed to batchGraphUpdates.
◆ maxGraphUpdateFreq
|
getset |
Limit for how often should graphs be updated.
- Deprecated:
- This field has been renamed to graphUpdateBatchingInterval.
◆ maxNearestNodeDistanceSqr
|
get |
Max Nearest Node Distance Squared.
- See also
- maxNearestNodeDistance
◆ NumParallelThreads
|
get |
Number of parallel pathfinders.
Returns the number of concurrent processes which can calculate paths at once. When using multithreading, this will be the number of threads, if not using multithreading it is always 1 (since only 1 coroutine is used).
- See also
- IsUsingMultithreading
The documentation for this class was generated from the following file:
- /Users/arong/Unity/a-pathfinding-project/Assets/AstarPathfindingProject/Core/AstarPath.cs
