Interface IAgent
Exposes properties of an Agent class.
A* Pro Feature:
This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited.
The Pro version can be bought here
Public Methods
Set the current velocity of the agent.
Set the normal of a wall (or something else) the agent is currently colliding with.
Add obstacles to avoid for this agent.
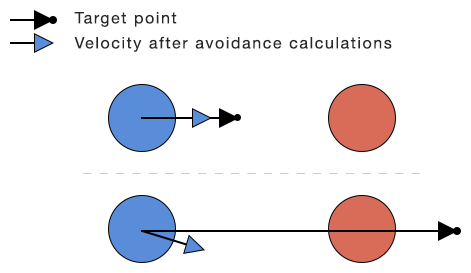
Point towards which the agent should move.
Public Variables
Internal index of the agent.
Max number of estimated seconds to look into the future for collisions with agents.
Optimal speed of the agent to avoid collisions.
Optimal point to move towards to avoid collisions.
Layer mask specifying which layers this agent will avoid.
Draw debug information in the scene view.
Determines how strongly this agent just follows the flow instead of making other agents avoid it.
Height of the agent in world units.
Specifies the avoidance layer for this agent.
Locked agents will be assumed not to move.
Max number of agents to take into account.
Plane in which the agent moves.
Number of neighbours that the agent took into account during the last simulation step.
Max number of estimated seconds to look into the future for collisions with obstacles.
Position of the agent.
Callback which will be called right before avoidance calculations are started.
How strongly other agents will avoid this agent.
Radius of the agent in world units.