Utility functions for working with polygons, lines, and other vector math. More...
Detailed Description
Utility functions for working with polygons, lines, and other vector math.
All functions which accepts Vector3s but work in 2D space uses the XZ space if nothing else is said.
- Version
- A lot of functions in this class have been moved to the VectorMath class the names have changed slightly and everything now consistently assumes a left handed coordinate system now instead of sometimes using a left handed one and sometimes using a right handed one. This is why the 'Left' methods redirect to methods named 'Right'. The functionality is exactly the same.
Static Public Member Functions | |
| static Vector2 | ClosestPointOnTriangle (Vector2 a, Vector2 b, Vector2 c, Vector2 p) |
| Closest point on the triangle abc to the point p. More... | |
| static Vector3 | ClosestPointOnTriangle (Vector3 a, Vector3 b, Vector3 c, Vector3 p) |
| Closest point on the triangle abc to the point p. More... | |
| static Vector3 | ClosestPointOnTriangleXZ (Vector3 a, Vector3 b, Vector3 c, Vector3 p) |
| Closest point on the triangle abc to the point p when seen from above. More... | |
| static void | CompressMesh (List< Int3 > vertices, List< int > triangles, out Int3[] outVertices, out int[] outTriangles) |
| Compress the mesh by removing duplicate vertices. More... | |
| static bool | ContainsPoint (Int2 a, Int2 b, Int2 c, Int2 p) |
| Returns if the triangle ABC contains the point p. More... | |
| static bool | ContainsPoint (Vector2[] polyPoints, Vector2 p) |
| Checks if p is inside the polygon. More... | |
| static bool | ContainsPointXZ (Vector3 a, Vector3 b, Vector3 c, Vector3 p) |
| Returns if the triangle ABC contains the point p in XZ space. More... | |
| static bool | ContainsPointXZ (Int3 a, Int3 b, Int3 c, Int3 p) |
| Returns if the triangle ABC contains the point p. More... | |
| static bool | ContainsPointXZ (Vector3[] polyPoints, Vector3 p) |
| Checks if p is inside the polygon (XZ space). More... | |
| static Vector3 [] | ConvexHullXZ (Vector3[] points) |
| Calculates convex hull in XZ space for the points. More... | |
| static int | SampleYCoordinateInTriangle (Int3 p1, Int3 p2, Int3 p3, Int3 p) |
| Sample Y coordinate of the triangle (p1, p2, p3) at the point p in XZ space. More... | |
| static void | Subdivide (List< Vector3 > points, List< Vector3 > result, int subSegments) |
| Divides each segment in the list into subSegments segments and fills the result list with the new points. More... | |
| static void | TraceContours (Dictionary< int, int > outline, HashSet< int > hasInEdge, System.Action< List< int >, bool > results) |
| Given a set of edges between vertices, follows those edges and returns them as chains and cycles. More... | |
Static Private Attributes | |
| static readonly Dictionary< Int3, int > | cached_Int3_int_dict = new Dictionary<Int3, int>() |
| Cached dictionary to avoid excessive allocations. More... | |
Member Function Documentation
◆ ClosestPointOnTriangle() [1/2]
|
static |
Closest point on the triangle abc to the point p.
- See also
- 'Real Time Collision Detection' by Christer Ericson, chapter 5.1, page 141
◆ ClosestPointOnTriangle() [2/2]
|
static |
Closest point on the triangle abc to the point p.
- See also
- 'Real Time Collision Detection' by Christer Ericson, chapter 5.1, page 141
◆ ClosestPointOnTriangleXZ()
|
static |
Closest point on the triangle abc to the point p when seen from above.
- See also
- 'Real Time Collision Detection' by Christer Ericson, chapter 5.1, page 141
◆ CompressMesh()
|
static |
Compress the mesh by removing duplicate vertices.
- Parameters
-
vertices Vertices of the input mesh triangles Triangles of the input mesh outVertices Vertices of the output mesh. outTriangles Triangles of the output mesh.
Vertices that differ by only 1 along the y coordinate will also be merged together.
- Warning
- This function is not threadsafe. It uses some cached structures to reduce allocations.
◆ ContainsPoint() [1/2]
Returns if the triangle ABC contains the point p.
The triangle vertices are assumed to be laid out in clockwise order.
◆ ContainsPoint() [2/2]
|
static |
Checks if p is inside the polygon.
◆ ContainsPointXZ() [1/3]
|
static |
Returns if the triangle ABC contains the point p in XZ space.
The triangle vertices are assumed to be laid out in clockwise order.
◆ ContainsPointXZ() [2/3]
Returns if the triangle ABC contains the point p.
The triangle vertices are assumed to be laid out in clockwise order.
◆ ContainsPointXZ() [3/3]
|
static |
Checks if p is inside the polygon (XZ space).
◆ ConvexHullXZ()
|
static |
Calculates convex hull in XZ space for the points.
Implemented using the very simple Gift Wrapping Algorithm which has a complexity of O(nh) where n is the number of points and h is the number of points on the hull, so it is in the worst case quadratic.
◆ SampleYCoordinateInTriangle()
Sample Y coordinate of the triangle (p1, p2, p3) at the point p in XZ space.
The y coordinate of p is ignored.
- Returns
- The interpolated y coordinate unless the triangle is degenerate in which case a DivisionByZeroException will be thrown
◆ Subdivide()
|
static |
Divides each segment in the list into subSegments segments and fills the result list with the new points.
◆ TraceContours()
|
static |
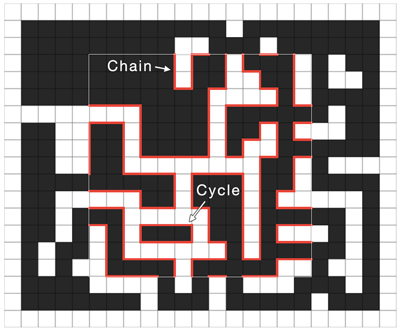
Given a set of edges between vertices, follows those edges and returns them as chains and cycles.
- Parameters
-
outline outline[a] = b if there is an edge from a to b. hasInEdge hasInEdge should contain b if outline[a] = b for any key a. results Will be called once for each contour with the contour as a parameter as well as a boolean indicating if the contour is a cycle or a chain (see image).
Member Data Documentation
◆ cached_Int3_int_dict
Cached dictionary to avoid excessive allocations.
The documentation for this class was generated from the following file:
- /Users/arong/Unity/a-pathfinding-project/Assets/AstarPathfindingProject/Core/AstarMath.cs
