Automatically generates navmesh graphs based on world geometry. More...
Detailed Description
Automatically generates navmesh graphs based on world geometry.
The recast graph is based on Recast (http://code.google.com/p/recastnavigation/).
I have translated a good portion of it to C# to run it natively in Unity.
How a recast graph works
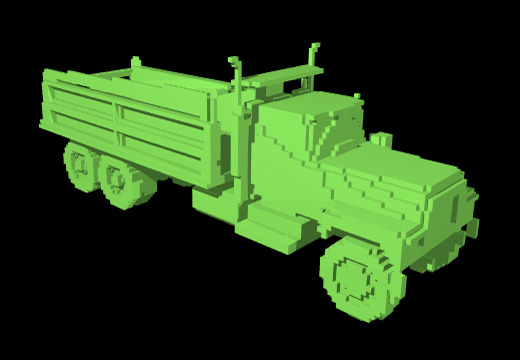
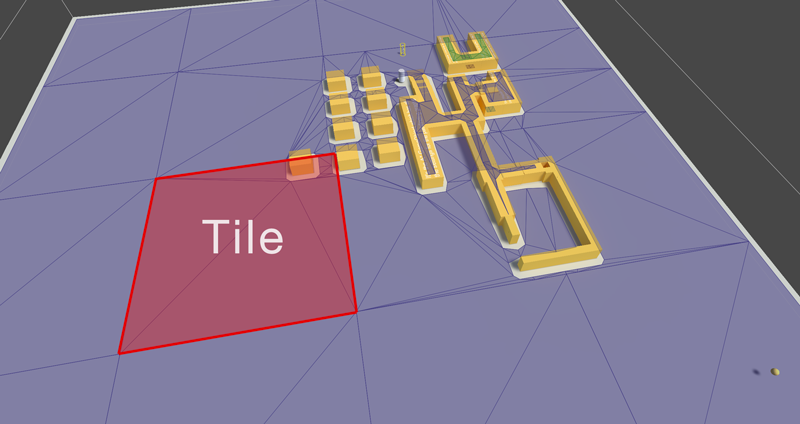
When generating a recast graph what happens is that the world is voxelized. You can think of this as constructing an approximation of the world out of lots of boxes. If you have played Minecraft it looks very similar (but with smaller boxes).
The Recast process is described as follows:
- The voxel mold is build from the input triangle mesh by rasterizing the triangles into a multi-layer heightfield. Some simple filters are then applied to the mold to prune out locations where the character would not be able to move.
- The walkable areas described by the mold are divided into simple overlayed 2D regions. The resulting regions have only one non-overlapping contour, which simplifies the final step of the process tremendously.
- The navigation polygons are peeled off from the regions by first tracing the boundaries and then simplifying them. The resulting polygons are finally converted to convex polygons which makes them perfect for pathfinding and spatial reasoning about the level.
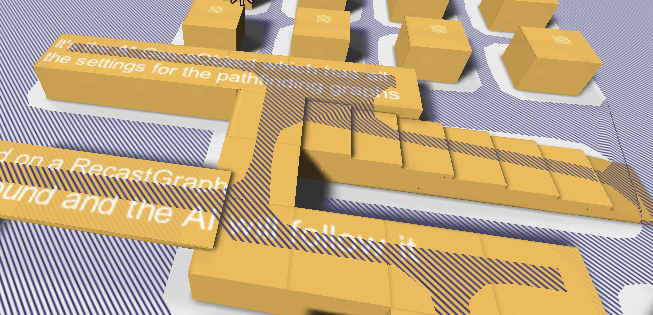
It works exactly like that in the C# version as well, except that everything is triangulated to triangles instead of n-gons. The recast generation process usually works directly on the visiable geometry in the world, this is usually a good thing, because world geometry is usually more detailed than the colliders. You can however specify that colliders should be rasterized, if you have very detailed world geometry, this can speed up the scan.
Check out the second part of the Get Started Tutorial which discusses recast graphs.
Exporting for manual editing
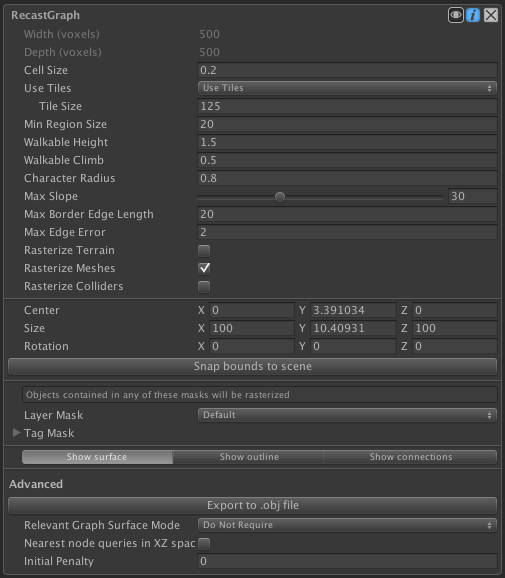
In the editor there is a button for exporting the generated graph to a .obj file. Usually the generation process is good enough for the game directly, but in some cases you might want to edit some minor details. So you can export the graph to a .obj file, open it in your favourite 3D application, edit it, and export it to a mesh which Unity can import. You can then use that mesh in a navmesh graph.
Since many 3D modelling programs use different axis systems (unity uses X=right, Y=up, Z=forward), it can be a bit tricky to get the rotation and scaling right. For blender for example, what you have to do is to first import the mesh using the .obj importer. Don't change anything related to axes in the settings. Then select the mesh, open the transform tab (usually the thin toolbar to the right of the 3D view) and set Scale -> Z to -1. If you transform it using the S (scale) hotkey, it seems to set both Z and Y to -1 for some reason. Then make the edits you need and export it as an .obj file to somewhere in the Unity project. But this time, edit the setting named "Forward" to "Z forward" (not -Z as it is per default).
- A* Pro Feature:
- This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited
The Pro version can be bought here
Public Types | |
| enum | RelevantGraphSurfaceMode { DoNotRequire, OnlyForCompletelyInsideTile, RequireForAll } |
Public Member Functions | |
| override GraphTransform | CalculateTransform () |
| Returns a new transform which transforms graph space to world space. More... | |
| Vector3 | ClosestPointOnNode (TriangleMeshNode node, Vector3 pos) |
| Returns the closest point of the node. More... | |
| bool | ContainsPoint (TriangleMeshNode node, Vector3 pos) |
| Returns if the point is inside the node in XZ space. More... | |
| void | SnapForceBoundsToScene () |
| Changes the bounds of the graph to precisely encapsulate all objects in the scene that can be included in the scanning process based on the settings. More... | |
 Public Member Functions inherited from NavmeshBase Public Member Functions inherited from NavmeshBase | |
| NavmeshBase () | |
| void | EndBatchTileUpdate () |
| End batch updating of tiles. More... | |
| override NNInfoInternal | GetNearest (Vector3 position, NNConstraint constraint, GraphNode hint) |
| Returns the nearest node to a position using the specified NNConstraint. More... | |
| override NNInfoInternal | GetNearestForce (Vector3 position, NNConstraint constraint) |
| Returns the nearest node to a position using the specified constraint . More... | |
| override void | GetNodes (System.Action< GraphNode > action) |
| Calls a delegate with all nodes in the graph. More... | |
| NavmeshTile | GetTile (int x, int z) |
| Tile at the specified x, z coordinate pair. More... | |
| Bounds | GetTileBounds (IntRect rect) |
| Returns a bounds object with the bounding box of a group of tiles. More... | |
| Bounds | GetTileBounds (int x, int z, int width=1, int depth=1) |
| Returns a bounds object with the bounding box of a group of tiles. More... | |
| Bounds | GetTileBoundsInGraphSpace (IntRect rect) |
| Bounds | GetTileBoundsInGraphSpace (int x, int z, int width=1, int depth=1) |
| Returns an XZ bounds object with the bounds of a group of tiles in graph space. More... | |
| void | GetTileCoordinates (int tileIndex, out int x, out int z) |
| Tile coordinates from a tile index. More... | |
| Int2 | GetTileCoordinates (Vector3 position) |
| Returns the tile coordinate which contains the specified position. More... | |
| NavmeshTile [] | GetTiles () |
| All tiles. More... | |
| IntRect | GetTouchingTiles (Bounds bounds, float margin=0) |
| Returns a rect containing the indices of all tiles touching the specified bounds. More... | |
| IntRect | GetTouchingTilesInGraphSpace (Rect rect) |
| Returns a rect containing the indices of all tiles touching the specified bounds. More... | |
| IntRect | GetTouchingTilesRound (Bounds bounds) |
| Returns a rect containing the indices of all tiles by rounding the specified bounds to tile borders. More... | |
| Int3 | GetVertex (int index) |
| Vertex coordinate for the specified vertex index. More... | |
| int | GetVertexArrayIndex (int index) |
| Int3 | GetVertexInGraphSpace (int index) |
| Vertex coordinate in graph space for the specified vertex index. More... | |
| bool | Linecast (Vector3 origin, Vector3 end) |
| Returns if there is an obstacle between origin and end on the graph. More... | |
| bool | Linecast (Vector3 origin, Vector3 end, GraphNode hint, out GraphHitInfo hit) |
| Returns if there is an obstacle between origin and end on the graph. More... | |
| bool | Linecast (Vector3 origin, Vector3 end, GraphNode hint) |
| Returns if there is an obstacle between origin and end on the graph. More... | |
| bool | Linecast (Vector3 origin, Vector3 end, GraphNode hint, out GraphHitInfo hit, List< GraphNode > trace) |
| Returns if there is an obstacle between origin and end on the graph. More... | |
| override void | OnDrawGizmos (Pathfinding.Util.RetainedGizmos gizmos, bool drawNodes) |
| GraphNode | PointOnNavmesh (Vector3 position, NNConstraint constraint) |
| Finds the first node which contains position. More... | |
| override void | RelocateNodes (Matrix4x4 deltaMatrix) |
| Moves the nodes in this graph. More... | |
| void | RelocateNodes (GraphTransform newTransform) |
| Moves the nodes in this graph. More... | |
| void | ReplaceTile (int x, int z, Int3[] verts, int[] tris) |
| Replace tile at index with nodes created from specified navmesh. More... | |
| void | StartBatchTileUpdate () |
| Start batch updating of tiles. More... | |
| Public Member Functions inherited from NavGraph | |
| virtual int | CountNodes () |
| Number of nodes in the graph. More... | |
| NNInfoInternal | GetNearest (Vector3 position) |
| Returns the nearest node to a position. More... | |
| NNInfoInternal | GetNearest (Vector3 position, NNConstraint constraint) |
| Returns the nearest node to a position using the specified NNConstraint. More... | |
| void | GetNodes (System.Func< GraphNode, bool > action) |
| Calls a delegate with all nodes in the graph until the delegate returns false. More... | |
| virtual void | OnDrawGizmos (RetainedGizmos gizmos, bool drawNodes) |
| Draw gizmos for the graph. More... | |
| void | RelocateNodes (Matrix4x4 oldMatrix, Matrix4x4 newMatrix) |
| Moves nodes in this graph. More... | |
| void | Scan () |
| Scan the graph. More... | |
| void | ScanGraph () |
| Scan the graph. More... | |
| void | SetMatrix (Matrix4x4 m) |
| Use to set both matrix and inverseMatrix at the same time. More... | |
Public Attributes | |
| const int | BorderVertexMask = 1 |
| const int | BorderVertexOffset = 31 |
| float | cellSize = 0.5F |
| Voxel sample size (x,z). More... | |
| float | characterRadius = 1.5F |
| Radius of the agent which will traverse the navmesh. More... | |
| float | colliderRasterizeDetail = 10 |
| Controls detail on rasterization of sphere and capsule colliders. More... | |
| float | contourMaxError = 2F |
| Max distance from simplified edge to real edge. More... | |
| int | editorTileSize = 128 |
| Size in voxels of a single tile. More... | |
| Vector3 | forcedBoundsCenter |
| Center of the bounding box. More... | |
| LayerMask | mask = -1 |
| Layer mask which filters which objects to include. More... | |
| float | maxEdgeLength = 20 |
| Longer edges will be subdivided. More... | |
| float | maxSlope = 30 |
| Max slope in degrees the character can traverse. More... | |
| float | minRegionSize = 3 |
| Minumum region size. More... | |
| bool | rasterizeColliders |
| Use colliders to calculate the navmesh. More... | |
| bool | rasterizeMeshes = true |
| Use scene meshes to calculate the navmesh. More... | |
| bool | rasterizeTerrain = true |
| Include the Terrain in the scene. More... | |
| bool | rasterizeTrees = true |
| Rasterize tree colliders on terrains. More... | |
| RelevantGraphSurfaceMode | relevantGraphSurfaceMode = RelevantGraphSurfaceMode.DoNotRequire |
| Require every region to have a RelevantGraphSurface component inside it. More... | |
| Vector3 | rotation |
| Rotation of the graph in degrees. More... | |
| bool | scanEmptyGraph |
| If true, scanning the graph will yield a completely empty graph. More... | |
| List< string > | tagMask = new List<string>() |
| Objects tagged with any of these tags will be rasterized. More... | |
| int | terrainSampleSize = 3 |
| Controls how large the sample size for the terrain is. More... | |
| int | tileSizeX = 128 |
| Size of a tile along the X axis in voxels. More... | |
| int | tileSizeZ = 128 |
| Size of a tile along the Z axis in voxels. More... | |
| bool | useTiles = true |
| If true, divide the graph into tiles, otherwise use a single tile covering the whole graph. More... | |
| float | walkableClimb = 0.5F |
| Height the character can climb. More... | |
| float | walkableHeight = 2F |
| Character height. More... | |
| Public Attributes inherited from NavmeshBase | |
| bool | enableNavmeshCutting = true |
| Should navmesh cuts affect this graph. More... | |
| Vector3 | forcedBoundsSize = new Vector3(100, 40, 100) |
| Size of the bounding box. More... | |
| bool | nearestSearchOnlyXZ |
| Perform nearest node searches in XZ space only. More... | |
| System.Action< NavmeshTile[]> | OnRecalculatedTiles |
| Called when tiles have been completely recalculated. More... | |
| bool | showMeshOutline = true |
| Show an outline of the polygons in the Unity Editor. More... | |
| bool | showMeshSurface |
| Show the surface of the navmesh. More... | |
| bool | showNodeConnections |
| Show the connections between the polygons in the Unity Editor. More... | |
| const int | TileIndexMask = 0x7FFFF |
| const int | TileIndexOffset = 12 |
| int | tileXCount |
| Number of tiles along the X-axis. More... | |
| int | tileZCount |
| Number of tiles along the Z-axis. More... | |
| GraphTransform | transform = new GraphTransform(Matrix4x4.identity) |
| Determines how the graph transforms graph space to world space. More... | |
| const int | VertexIndexMask = 0xFFF |
| Public Attributes inherited from NavGraph | |
| AstarPath | active |
| Reference to the AstarPath object in the scene. More... | |
| bool | drawGizmos = true |
| Enable to draw gizmos in the Unity scene view. More... | |
| uint | graphIndex |
| Index of the graph, used for identification purposes. More... | |
| Guid | guid |
| Used as an ID of the graph, considered to be unique. More... | |
| bool | infoScreenOpen |
| Used in the editor to check if the info screen is open. More... | |
| uint | initialPenalty |
| Default penalty to apply to all nodes. More... | |
| Matrix4x4 | inverseMatrix = Matrix4x4.identity |
| Inverse of matrix. More... | |
| Matrix4x4 | matrix = Matrix4x4.identity |
| A matrix for translating/rotating/scaling the graph. More... | |
| string | name |
| Name of the graph. More... | |
| bool | open |
| Is the graph open in the editor. More... | |
Protected Member Functions | |
| NavmeshTile | BuildTileMesh (Voxelize vox, int x, int z, int threadIndex=0) |
| override void | DeserializeSettingsCompatibility (GraphSerializationContext ctx) |
| An old format for serializing settings. More... | |
| IEnumerable< Progress > | ScanAllTiles () |
| override IEnumerable< Progress > | ScanInternal () |
| Internal method to scan the graph. More... | |
| Protected Member Functions inherited from NavmeshBase | |
| void | ClearTile (int x, int z) |
| Clear the tile at the specified coordinate. More... | |
| void | ConnectTiles (NavmeshTile tile1, NavmeshTile tile2) |
| Generate connections between the two tiles. More... | |
| void | ConnectTileWithNeighbours (NavmeshTile tile, bool onlyUnflagged=false) |
| void | CreateNodes (TriangleMeshNode[] buffer, int[] tris, int tileIndex, uint graphIndex) |
| override void | DeserializeExtraInfo (GraphSerializationContext ctx) |
| Deserializes graph type specific node data. More... | |
| void | FillWithEmptyTiles () |
| Fills graph with tiles created by NewEmptyTile. More... | |
| NavmeshTile | NewEmptyTile (int x, int z) |
| Creates a single new empty tile. More... | |
| override void | OnDestroy () |
| Function for cleaning up references. More... | |
| override void | PostDeserialization (GraphSerializationContext ctx) |
| Called after all deserialization has been done for all graphs. More... | |
| void | RemoveConnectionsFromTile (NavmeshTile tile) |
| void | RemoveConnectionsFromTo (NavmeshTile a, NavmeshTile b) |
| override void | SerializeExtraInfo (GraphSerializationContext ctx) |
| Serializes Node Info. More... | |
| Protected Member Functions inherited from NavGraph | |
| virtual void | DestroyAllNodes () |
| Destroys all nodes in the graph. More... | |
| void | DrawUnwalkableNodes (float size) |
Properties | |
| float | CellHeight [get] |
| int | CharacterRadiusInVoxels [get] |
| Convert character radius to a number of voxels. More... | |
| Bounds | forcedBounds [get] |
| World bounds for the graph. More... | |
| override float | MaxTileConnectionEdgeDistance [get] |
| override bool | RecalculateNormals [get] |
| int | TileBorderSizeInVoxels [get] |
| Number of extra voxels on each side of a tile to ensure accurate navmeshes near the tile border. More... | |
| float | TileBorderSizeInWorldUnits [get] |
| override float | TileWorldSizeX [get] |
| override float | TileWorldSizeZ [get] |
| Properties inherited from NavmeshBase | |
| abstract float | MaxTileConnectionEdgeDistance [get] |
| Maximum (vertical) distance between the sides of two nodes for them to be connected across a tile edge. More... | |
| abstract bool | RecalculateNormals [get] |
| Determines how normals are calculated. More... | |
| abstract float | TileWorldSizeX [get] |
| Size of a tile in world units along the X axis. More... | |
| abstract float | TileWorldSizeZ [get] |
| Size of a tile in world units along the Z axis. More... | |
| GraphTransform ITransformedGraph. | transform [get] |
| Properties inherited from NavGraph | |
| bool | exists [get] |
| True if the graph exists, false if it has been destroyed. More... | |
| string IGraphInternals. | SerializedEditorSettings [get, set] |
| Properties inherited from IGraphInternals | |
| string | SerializedEditorSettings [get, set] |
| Properties inherited from ITransformedGraph | |
| GraphTransform | transform [get] |
Private Member Functions | |
| Bounds | CalculateTileBoundsWithBorder (int x, int z) |
| GraphUpdateThreading IUpdatableGraph. | CanUpdateAsync (GraphUpdateObject o) |
| List< RasterizationMesh > | CollectMeshes (Bounds bounds) |
| NavmeshTile | CreateTile (Voxelize vox, VoxelMesh mesh, int x, int z, int threadIndex) |
| Create a tile at tile index x, z from the mesh. More... | |
| void | InitializeTileInfo () |
| List< RasterizationMesh > [] | PutMeshesIntoTileBuckets (List< RasterizationMesh > meshes) |
| Creates a list for every tile and adds every mesh that touches a tile to the corresponding list. More... | |
| void IUpdatableGraph. | UpdateArea (GraphUpdateObject guo) |
| Updates an area using the specified #GraphUpdateObject. More... | |
| void IUpdatableGraph. | UpdateAreaInit (GraphUpdateObject o) |
| May be called on the Unity thread before starting the update. More... | |
| void IUpdatableGraph. | UpdateAreaPost (GraphUpdateObject guo) |
| Called on the Unity thread to complete a graph update. More... | |
Private Attributes | |
| Voxelize | globalVox |
| List< NavmeshTile > | stagingTiles = new List<NavmeshTile>() |
| List of tiles that have been calculated in a graph update, but have not yet been added to the graph. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from NavmeshBase | |
| static int | GetTileIndex (int index) |
| Tile index from a vertex index. More... | |
| static bool | Linecast (NavmeshBase graph, Vector3 origin, Vector3 end, GraphNode hint, out GraphHitInfo hit) |
| Returns if there is an obstacle between origin and end on the graph. More... | |
| static bool | Linecast (NavmeshBase graph, Vector3 origin, Vector3 end, GraphNode hint, out GraphHitInfo hit, List< GraphNode > trace) |
| Returns if there is an obstacle between origin and end on the graph. More... | |
| Static Protected Member Functions inherited from NavmeshBase | |
| static void | CreateNodeConnections (TriangleMeshNode[] nodes) |
| Create connections between all nodes. More... | |
| Protected Attributes inherited from NavmeshBase | |
| NavmeshTile [] | tiles |
| All tiles. More... | |
| Package Attributes inherited from NavmeshBase | |
| readonly NavmeshUpdates.NavmeshUpdateSettings | navmeshUpdateData |
| Handles navmesh cutting. More... | |
Member Enumeration Documentation
◆ RelevantGraphSurfaceMode
|
strong |
| Enumerator | |
|---|---|
| DoNotRequire | No RelevantGraphSurface components are required anywhere. |
| OnlyForCompletelyInsideTile | Any surfaces that are completely inside tiles need to have a RelevantGraphSurface component positioned on that surface, otherwise it will be stripped away. |
| RequireForAll | All surfaces need to have one RelevantGraphSurface component positioned somewhere on the surface and in each tile that it touches, otherwise it will be stripped away. Only tiles that have a RelevantGraphSurface component for that surface will keep it. |
Member Function Documentation
◆ BuildTileMesh()
|
protected |
◆ CalculateTileBoundsWithBorder()
|
private |
◆ CalculateTransform()
|
virtual |
Returns a new transform which transforms graph space to world space.
Does not update the transform field.
- See also
- RelocateNodes(GraphTransform)
Implements NavmeshBase.
◆ CanUpdateAsync()
|
private |
Implements IUpdatableGraph.
◆ ClosestPointOnNode()
| Vector3 ClosestPointOnNode | ( | TriangleMeshNode | node, |
| Vector3 | pos | ||
| ) |
Returns the closest point of the node.
◆ CollectMeshes()
|
private |
◆ ContainsPoint()
| bool ContainsPoint | ( | TriangleMeshNode | node, |
| Vector3 | pos | ||
| ) |
Returns if the point is inside the node in XZ space.
◆ CreateTile()
|
private |
Create a tile at tile index x, z from the mesh.
- Version
- Since version 3.7.6 the implementation is thread safe
◆ DeserializeSettingsCompatibility()
|
protectedvirtual |
An old format for serializing settings.
- Deprecated:
- This is deprecated now, but the deserialization code is kept to avoid loosing data when upgrading from older versions.
Reimplemented from NavGraph.
◆ InitializeTileInfo()
|
private |
◆ PutMeshesIntoTileBuckets()
|
private |
Creates a list for every tile and adds every mesh that touches a tile to the corresponding list.
◆ ScanAllTiles()
|
protected |
◆ ScanInternal()
|
protectedvirtual |
Internal method to scan the graph.
Called from AstarPath.ScanAsync. Override this function to implement custom scanning logic. Progress objects can be yielded to show progress info in the editor and to split up processing over several frames when using async scanning.
Implements NavGraph.
◆ SnapForceBoundsToScene()
| void SnapForceBoundsToScene | ( | ) |
Changes the bounds of the graph to precisely encapsulate all objects in the scene that can be included in the scanning process based on the settings.
Which objects are used depends on the settings. If an object would have affected the graph with the current settings if it would have been inside the bounds of the graph, it will be detected and the bounds will be expanded to contain that object.
This method corresponds to the 'Snap bounds to scene' button in the inspector.
◆ UpdateArea()
|
private |
Updates an area using the specified #GraphUpdateObject.
Notes to implementators. This function should (in order):
- Call o.WillUpdateNode on the GUO for every node it will update, it is important that this is called BEFORE any changes are made to the nodes.
- Update walkabilty using special settings such as the usePhysics flag used with the GridGraph.
- Call Apply on the GUO for every node which should be updated with the GUO.
- Update connectivity info if appropriate (GridGraphs updates connectivity, but most other graphs don't since then the connectivity cannot be recovered later).
Implements IUpdatableGraph.
◆ UpdateAreaInit()
|
private |
May be called on the Unity thread before starting the update.
- See also
- CanUpdateAsync
Implements IUpdatableGraph.
◆ UpdateAreaPost()
|
private |
Called on the Unity thread to complete a graph update.
Implements IUpdatableGraph.
Member Data Documentation
◆ BorderVertexMask
| const int BorderVertexMask = 1 |
◆ BorderVertexOffset
| const int BorderVertexOffset = 31 |
◆ cellSize
| float cellSize = 0.5F |
Voxel sample size (x,z).
When generating a recast graph what happens is that the world is voxelized. You can think of this as constructing an approximation of the world out of lots of boxes. If you have played Minecraft it looks very similar (but with smaller boxes).
Lower values will yield higher quality navmeshes, however the graph will be slower to scan.
◆ characterRadius
| float characterRadius = 1.5F |
Radius of the agent which will traverse the navmesh.
The navmesh will be eroded with this radius.
◆ colliderRasterizeDetail
| float colliderRasterizeDetail = 10 |
Controls detail on rasterization of sphere and capsule colliders.
This controls the number of rows and columns on the generated meshes. A higher value does not necessarily increase quality of the mesh, but a lower value will often speed it up.
You should try to keep this value as low as possible without affecting the mesh quality since that will yield the fastest scan times.
- See also
- rasterizeColliders
◆ contourMaxError
| float contourMaxError = 2F |
Max distance from simplified edge to real edge.
This value is measured in voxels. So with the default value of 2 it means that the final navmesh contour may be at most 2 voxels (i.e 2 times cellSize) away from the border that was calculated when voxelizing the world. A higher value will yield a more simplified and cleaner navmesh while a lower value may capture more details. However a too low value will cause the individual voxels to be visible (see image below).
- See also
- cellSize
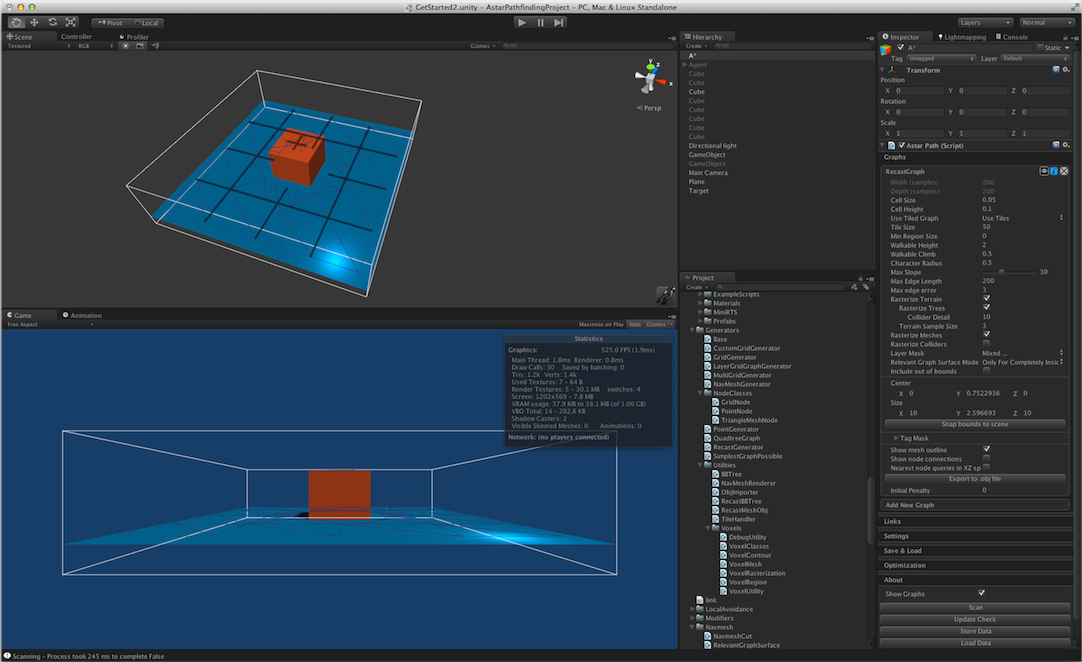
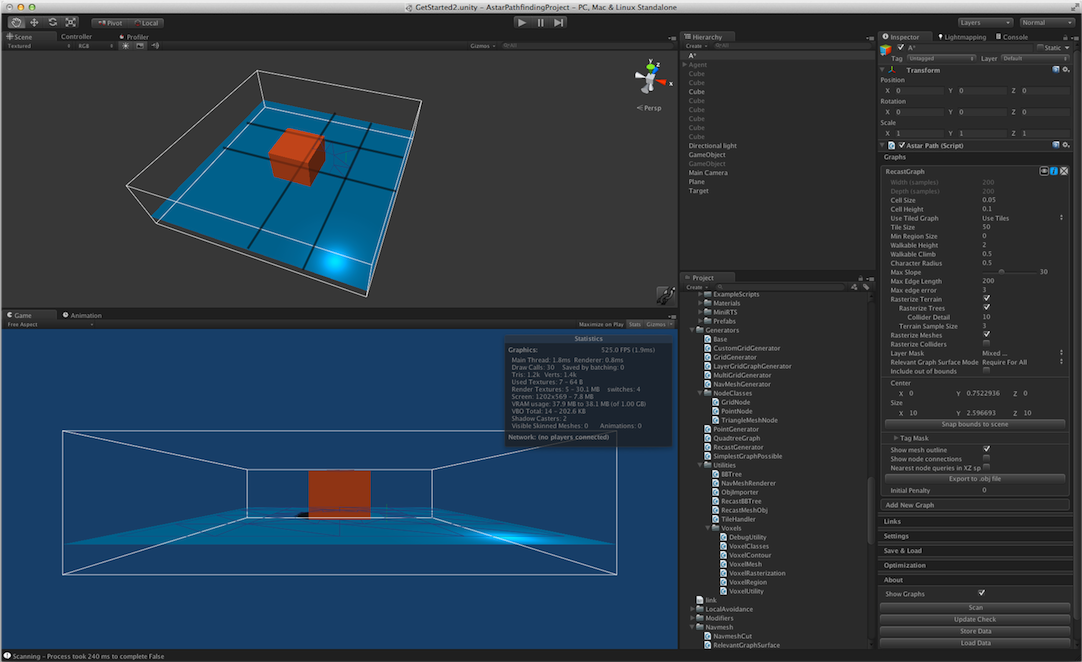
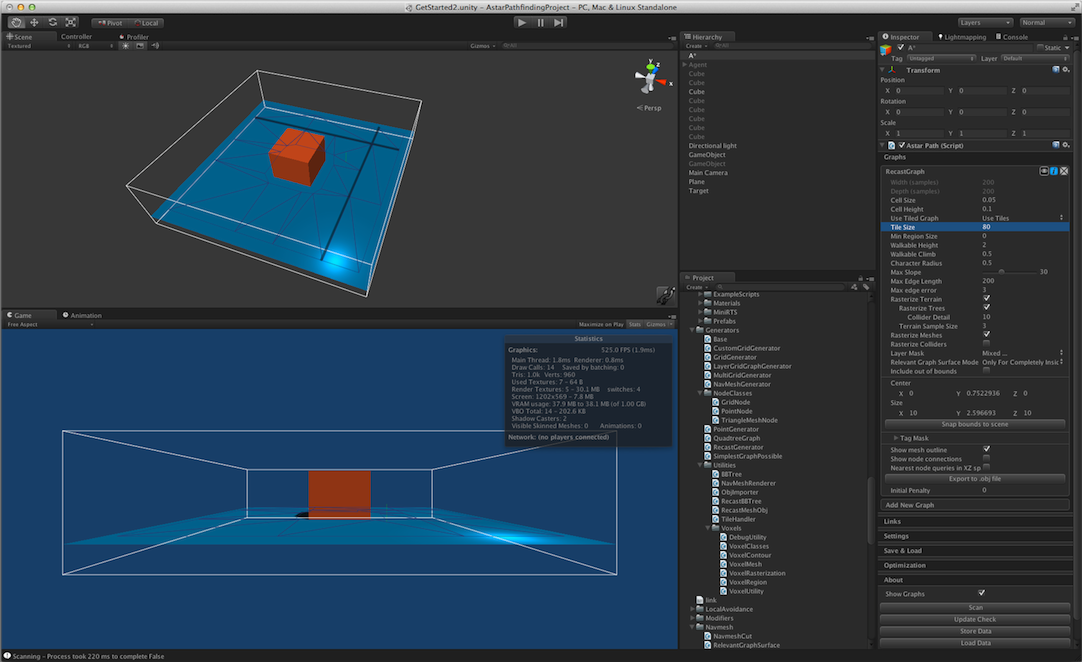
◆ editorTileSize
| int editorTileSize = 128 |
Size in voxels of a single tile.
This is the width of the tile.
A large tile size can be faster to initially scan (but beware of out of memory issues if you try with a too large tile size in a large world) smaller tile sizes are (much) faster to update.
Different tile sizes can affect the quality of paths. It is often good to split up huge open areas into several tiles for better quality paths, but too small tiles can also lead to effects looking like invisible obstacles. For more information about this take a look at Notes about navmesh graphs. Usually it is best to experiment and see what works best for your game.
When scanning a recast graphs individual tiles can be calculated in parallel which can make it much faster to scan large worlds. When you want to recalculate a part of a recast graph, this can only be done on a tile-by-tile basis which means that if you often try to update a region of the recast graph much smaller than the tile size, then you will be doing a lot of unnecessary calculations. However if you on the other hand update regions of the recast graph that are much larger than the tile size then it may be slower than necessary as there is some overhead in having lots of tiles instead of a few larger ones (not that much though).
Recommended values are between 64 and 256, but these are very soft limits. It is possible to use both larger and smaller values.
◆ forcedBoundsCenter
| Vector3 forcedBoundsCenter |
Center of the bounding box.
Scanning will only be done inside the bounding box
◆ globalVox
|
private |
◆ mask
| LayerMask mask = -1 |
Layer mask which filters which objects to include.
- See also
- tagMask
◆ maxEdgeLength
| float maxEdgeLength = 20 |
Longer edges will be subdivided.
Reducing this value can sometimes improve path quality since similarly sized triangles yield better paths than really large and really triangles small next to each other. However it will also add a lot more nodes which will make pathfinding slower. For more information about this take a look at Notes about navmesh graphs.
◆ maxSlope
| float maxSlope = 30 |
Max slope in degrees the character can traverse.
◆ minRegionSize
| float minRegionSize = 3 |
Minumum region size.
Small regions will be removed from the navmesh. Measured in square world units (square meters in most games).
If a region is adjacent to a tile border, it will not be removed even though it is small since the adjacent tile might join it to form a larger region.
◆ rasterizeColliders
| bool rasterizeColliders |
Use colliders to calculate the navmesh.
◆ rasterizeMeshes
| bool rasterizeMeshes = true |
Use scene meshes to calculate the navmesh.
◆ rasterizeTerrain
| bool rasterizeTerrain = true |
Include the Terrain in the scene.
◆ rasterizeTrees
| bool rasterizeTrees = true |
Rasterize tree colliders on terrains.
If the tree prefab has a collider, that collider will be rasterized. Otherwise a simple box collider will be used and the script will try to adjust it to the tree's scale, it might not do a very good job though so an attached collider is preferable.
- Note
- It seems that Unity will only generate tree colliders at runtime when the game is started. For this reason, this graph will not pick up tree colliders when scanned outside of play mode but it will pick them up if the graph is scanned when the game has started. If it still does not pick them up make sure that the trees actually have colliders attached to them and that the tree prefabs are in the correct layer (the layer should be included in the layer mask).
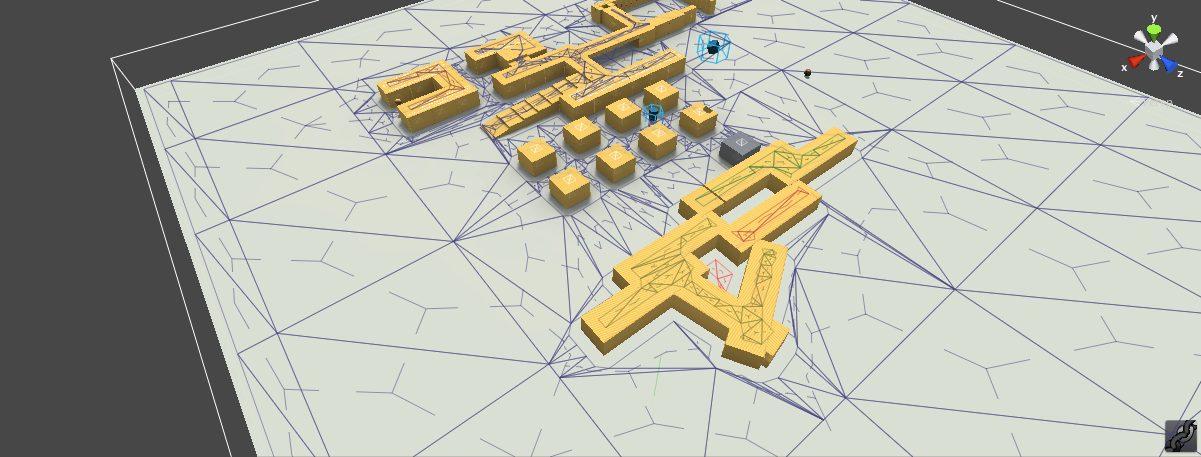
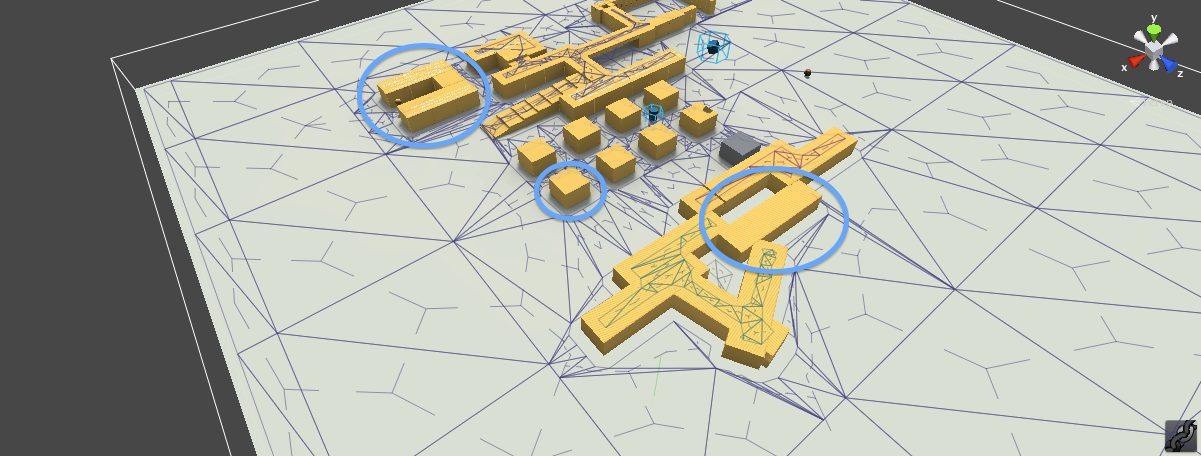
◆ relevantGraphSurfaceMode
| RelevantGraphSurfaceMode relevantGraphSurfaceMode = RelevantGraphSurfaceMode.DoNotRequire |
Require every region to have a RelevantGraphSurface component inside it.
A RelevantGraphSurface component placed in the scene specifies that the navmesh region it is inside should be included in the navmesh.
If this is set to OnlyForCompletelyInsideTile a navmesh region is included in the navmesh if it has a RelevantGraphSurface inside it, or if it is adjacent to a tile border. This can leave some small regions which you didn't want to have included because they are adjacent to tile borders, but it removes the need to place a component in every single tile, which can be tedious (see below).
If this is set to RequireForAll a navmesh region is included only if it has a RelevantGraphSurface inside it. Note that even though the navmesh looks continous between tiles, the tiles are computed individually and therefore you need a RelevantGraphSurface component for each region and for each tile.
- Note
- When not using tiles. OnlyForCompletelyInsideTile is equivalent to RequireForAll.
◆ rotation
| Vector3 rotation |
Rotation of the graph in degrees.
◆ scanEmptyGraph
| bool scanEmptyGraph |
If true, scanning the graph will yield a completely empty graph.
Useful if you want to replace the graph with a custom navmesh for example
◆ stagingTiles
|
private |
List of tiles that have been calculated in a graph update, but have not yet been added to the graph.
When updating the graph in a separate thread, large changes cannot be made directly to the graph as other scripts might use the graph data structures at the same time in another thread. So the tiles are calculated, but they are not yet connected to the existing tiles that will be done in UpdateAreaPost which runs in the Unity thread.
◆ tagMask
| List<string> tagMask = new List<string>() |
◆ terrainSampleSize
| int terrainSampleSize = 3 |
Controls how large the sample size for the terrain is.
A higher value is faster to scan but less accurate
◆ tileSizeX
| int tileSizeX = 128 |
Size of a tile along the X axis in voxels.
This is the width of the tile.
A large tile size can be faster to initially scan (but beware of out of memory issues if you try with a too large tile size in a large world) smaller tile sizes are (much) faster to update.
Different tile sizes can affect the quality of paths. It is often good to split up huge open areas into several tiles for better quality paths, but too small tiles can also lead to effects looking like invisible obstacles. For more information about this take a look at Notes about navmesh graphs. Usually it is best to experiment and see what works best for your game.
When scanning a recast graphs individual tiles can be calculated in parallel which can make it much faster to scan large worlds. When you want to recalculate a part of a recast graph, this can only be done on a tile-by-tile basis which means that if you often try to update a region of the recast graph much smaller than the tile size, then you will be doing a lot of unnecessary calculations. However if you on the other hand update regions of the recast graph that are much larger than the tile size then it may be slower than necessary as there is some overhead in having lots of tiles instead of a few larger ones (not that much though).
Recommended values are between 64 and 256, but these are very soft limits. It is possible to use both larger and smaller values.
- Warning
- Do not modify, it is set from editorTileSize at Scan
- See also
- tileSizeZ
◆ tileSizeZ
| int tileSizeZ = 128 |
Size of a tile along the Z axis in voxels.
This is the width of the tile.
A large tile size can be faster to initially scan (but beware of out of memory issues if you try with a too large tile size in a large world) smaller tile sizes are (much) faster to update.
Different tile sizes can affect the quality of paths. It is often good to split up huge open areas into several tiles for better quality paths, but too small tiles can also lead to effects looking like invisible obstacles. For more information about this take a look at Notes about navmesh graphs. Usually it is best to experiment and see what works best for your game.
When scanning a recast graphs individual tiles can be calculated in parallel which can make it much faster to scan large worlds. When you want to recalculate a part of a recast graph, this can only be done on a tile-by-tile basis which means that if you often try to update a region of the recast graph much smaller than the tile size, then you will be doing a lot of unnecessary calculations. However if you on the other hand update regions of the recast graph that are much larger than the tile size then it may be slower than necessary as there is some overhead in having lots of tiles instead of a few larger ones (not that much though).
Recommended values are between 64 and 256, but these are very soft limits. It is possible to use both larger and smaller values.
- Warning
- Do not modify, it is set from editorTileSize at Scan
- See also
- tileSizeX
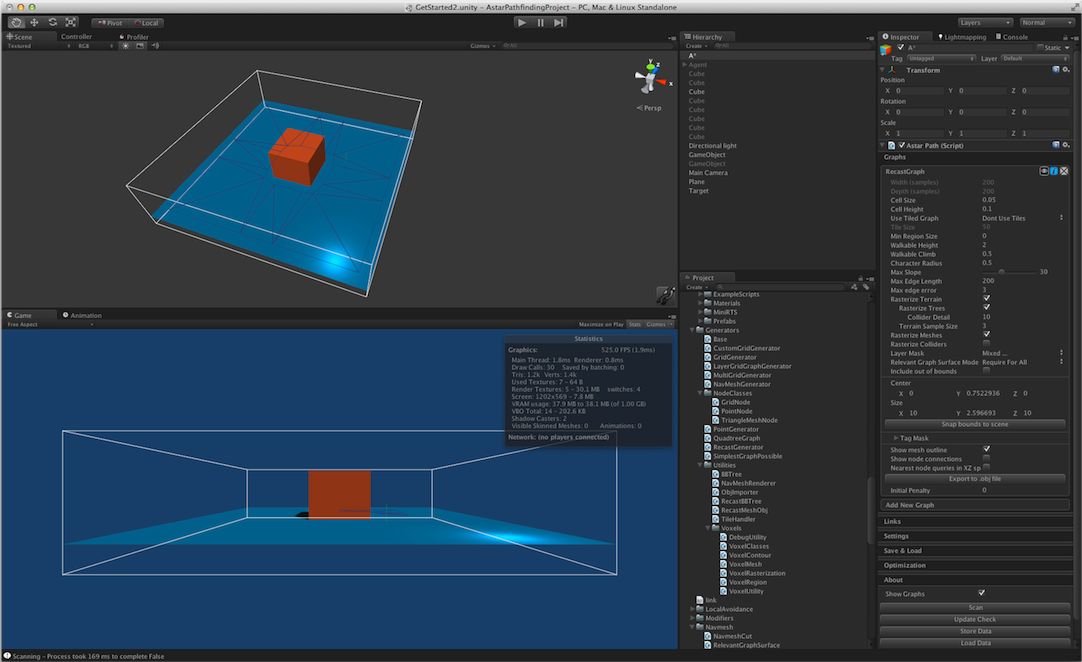
◆ useTiles
| bool useTiles = true |
If true, divide the graph into tiles, otherwise use a single tile covering the whole graph.
- Since
- Since 4.1 the default value is true.
◆ walkableClimb
| float walkableClimb = 0.5F |
Height the character can climb.
◆ walkableHeight
| float walkableHeight = 2F |
Character height.
Property Documentation
◆ CellHeight
|
getprivate |
◆ CharacterRadiusInVoxels
|
getprivate |
Convert character radius to a number of voxels.
◆ forcedBounds
|
get |
World bounds for the graph.
Defined as a bounds object with size forcedBoundsSize and centered at forcedBoundsCenter
- Deprecated:
- Obsolete since this is not accurate when the graph is rotated (rotation was not supported when this property was created)
◆ MaxTileConnectionEdgeDistance
|
getprotected |
◆ RecalculateNormals
|
getprotected |
◆ TileBorderSizeInVoxels
|
getprivate |
Number of extra voxels on each side of a tile to ensure accurate navmeshes near the tile border.
The width of a tile is expanded by 2 times this value (1x to the left and 1x to the right)
◆ TileBorderSizeInWorldUnits
|
getprivate |
◆ TileWorldSizeX
|
get |
◆ TileWorldSizeZ
|
get |
The documentation for this class was generated from the following file:
- /Users/arong/Unity/a-pathfinding-project/Assets/AstarPathfindingProject/Generators/RecastGenerator.cs
