Class ConstantPath Extends Path
Finds all nodes within a specified distance from the start.
This class will search outwards from the start point and find all nodes which it costs less than EndingConditionDistance.maxGScore to reach, this is usually the same as the distance to them multiplied with 1000.
The path can be called like: // Here you create a new path and set how far it should search. When the path has been calculated, all nodes it searched will be stored in the variable ConstantPath.allNodes (remember that you need to cast it from Path to ConstantPath first to get the variable).
ConstantPath cpath = ConstantPath.Construct(transform.position, 20000, null);
AstarPath.StartPath(cpath);
// Block until the path has been calculated. You can also calculate it asynchronously
// by providing a callback in the constructor above.
cpath.BlockUntilCalculated();
// Draw a line upwards from all nodes within range
for (int i = 0; i < cpath.allNodes.Count; i++) {
Debug.DrawRay((Vector3)cpath.allNodes[i].position, Vector3.up, Color.red, 2f);
}
This list will be sorted by the cost to reach that node (more specifically the G score if you are familiar with the terminology for search algorithms). 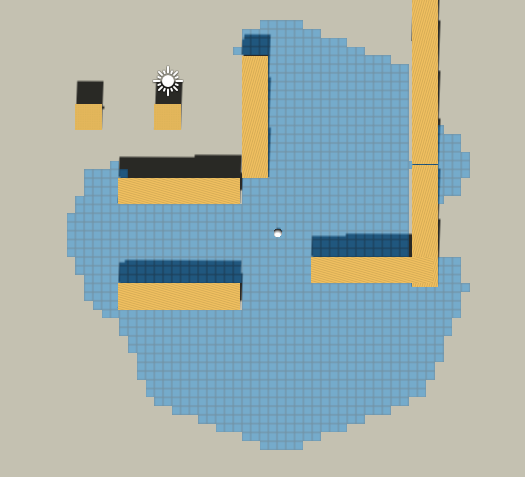
This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited.
The Pro version can be bought here
Public Methods
Public Static Methods
Constructs a ConstantPath starting from the specified point.
Public Variables
Contains all nodes the path found.
Determines when the path calculation should stop.
Inherited Public Members
Current state of the path.
Opens a connection between two nodes during the A* search.
Burst-compiled internal implementation of OpenCandidateConnection.
Open a connection to the temporary end node if necessary.
Returns the state of the path in the pathfinding pipeline.
Paths use this to skip adding nodes to the search heap.
Callback to call when the path is complete.
How long it took to calculate this path in milliseconds.
Which graph tags are traversable.
If the path failed, this is true.
Additional info on why a path failed.
Determines which heuristic to use.
Scale of the heuristic values.
Immediate callback to call when the path is complete.
Constraint for how to search for nodes.
ID of this path.
Number of nodes this path has searched.
Penalties for each tag.
Provides additional traversal information to a path request.
Holds the (possibly post-processed) path as a Vector3 list.
Private/Protected Members
Calculates the path until completed or until the time has passed targetTick.
Writes text shared for all overrides of DebugString to the string builder.
Writes text shared for all overrides of DebugString to the string builder.
Called when a valid node has been found for the end of the path.
List of zeroes to use as default tag penalties.
Target to use for H score calculation.
True if the Reset function has been called.
Target to use for H score calculations.
The tag penalties that are actually used.
Data for the thread calculating this path.