Public
RVO Character Controller.
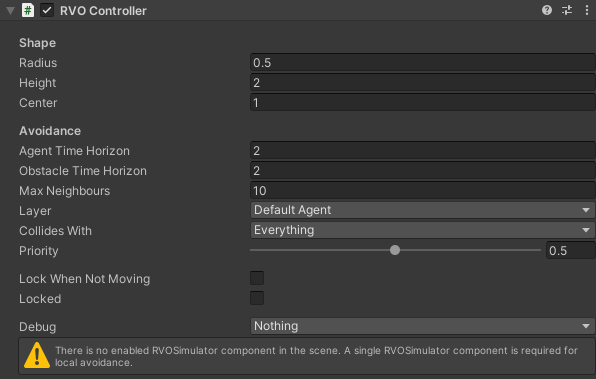
Similar to Unity's CharacterController. It handles movement calculations and takes other agents into account. It does not handle movement itself, but allows the calling script to get the calculated velocity and use that to move the object using a method it sees fit (for example using a CharacterController, using transform.Translate or using a rigidbody).
public void Update () {
// Just some point far away
var targetPoint = transform.position + transform.forward * 100;
// Set the desired point to move towards using a desired speed of 10 and a max speed of 12
controller.SetTarget(targetPoint, 10, 12, targetPoint);
// Calculate how much to move during this frame
// This information is based on movement commands from earlier frames
// as local avoidance is calculated globally at regular intervals by the RVOSimulator component
var delta = controller.CalculateMovementDelta(transform.position, Time.deltaTime);
transform.position = transform.position + delta;
}
For documentation of many of the variables of this class: refer to the Pathfinding.RVO.IAgent interface.
A* Pro Feature:
This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited.
The Pro version can be bought here
Public Methods
Vector3
CalculateMovementDelta
(
float | deltaTime | How far to move [seconds]. Usually set to Time.deltaTime. |
)
Direction and distance to move in a single frame to avoid obstacles.
The position of the agent is taken from the attached movement script's position (see Pathfinding.IAstarAI.position) or if none is attached then transform.position.
Vector3
CalculateMovementDelta
(
Vector3 | position | Position of the agent. |
float | deltaTime | How far to move [seconds]. Usually set to Time.deltaTime. |
)
Direction and distance to move in a single frame to avoid obstacles.
public void Update () {
// Just some point far away
var targetPoint = transform.position + transform.forward * 100;
// Set the desired point to move towards using a desired speed of 10 and a max speed of 12
controller.SetTarget(targetPoint, 10, 12, targetPoint);
// Calculate how much to move during this frame
// This information is based on movement commands from earlier frames
// as local avoidance is calculated globally at regular intervals by the RVOSimulator component
var delta = controller.CalculateMovementDelta(transform.position, Time.deltaTime);
transform.position = transform.position + delta;
}
void
Move
(
Vector3 | velocity | Velocity in units/second that you want the agent to move with. |
)
Set the desired velocity for the agent.
This is assumed to stay the same until something else is requested (as opposed to being reset every frame).
Note
In most cases the SetTarget method is better to use. What this will actually do is call SetTarget with (position + velocity). See the note in the documentation for IAgent.SetTarget about the potential issues that this can cause (in particular that it might be hard to get the agent to stop at a precise point).
void
SetCollisionNormal
(
)
Set the normal of a wall (or something else) the agent is currently colliding with.
This is used to make the RVO system aware of things like physics or an agent being clamped to the navmesh. The velocity of this agent that other agents observe will be modified so that there is no component into the wall. The agent will however not start to avoid the wall, for that you will need to add RVO obstacles.
This value will be cleared after the next simulation step, normally it should be set every frame when the collision is still happening.
void
SetTarget
(
Vector3 | pos | Point in world space to move towards. |
float | speed | Desired speed in world units per second. |
float | maxSpeed | Maximum speed in world units per second. The agent will use this speed if it is necessary to avoid collisions with other agents. Should be at least as high as speed, but it is recommended to use a slightly higher value than speed (for example speed*1.2). |
Vector3 | endOfPath | Point in world space which is the agent's final desired destination on the navmesh. This is typically the end of the path the agent is following. May be set to (+inf,+inf,+inf) to mark the agent as not having a well defined end of path. If this is set, multiple agents with roughly the same end of path will crowd more naturally around this point. They will be able to realize that they cannot get closer if there are many agents trying to get closer to the same destination and then stop. |
)
Set the target point for the agent to move towards.
Similar to the Move method but this is more flexible. It is also better to use near the end of the path as when using the Move method the agent does not know where to stop, so it may overshoot the target. When using this method the agent will not overshoot the target. The agent will assume that it will stop when it reaches the target so make sure that you don't place the point too close to the agent if you actually just want to move in a particular direction.
The target point is assumed to stay the same until something else is requested (as opposed to being reset every frame).
)
Converts a 3D vector to a 2D vector in the movement plane.
If movementPlane is XZ it will be projected onto the XZ plane otherwise it will be projected onto the XY plane.
)
Converts a 3D vector to a 2D vector in the movement plane.
If movementPlane is XZ it will be projected onto the XZ plane and the elevation coordinate will be the Y coordinate otherwise it will be projected onto the XY plane and elevation will be the Z coordinate.
Vector2 | p | |
float | elevationCoordinate | |
)
Converts a 2D vector in the movement plane as well as an elevation to a 3D coordinate.
Public Variables
bool
AvoidingAnyAgents
True if the agent's movement is affected by any other agents or obstacles.
If the agent is all alone, and can just move in a straight line to its target, this will be false. If it has to adjust its velocity, even slightly, to avoid collisions, this will be true.
float
agentTimeHorizon = 2
How far into the future to look for collisions with other agents (in seconds)
float
center
Center of the agent relative to the pivot point of this game object.
Note
If a movement script (AIPath/RichAI/AILerp, anything implementing the IAstarAI interface) is attached to the same GameObject, this value will be driven by that script.
Layer mask specifying which layers this agent will avoid.
You can set it as CollidesWith = RVOLayer.DefaultAgent | RVOLayer.Layer3 | RVOLayer.Layer6 ...
This can be very useful in games which have multiple teams of some sort. For example you usually want the agents in one team to avoid each other, but you do not want them to avoid the enemies.
This field only affects which other agents that this agent will avoid, it does not affect how other agents react to this agent.
Enables drawing debug information in the scene view.
float
flowFollowingStrength = 0.0f
Determines how strongly this agent just follows the flow instead of making other agents avoid it.
The default value is 0, if it is greater than zero (up to the maximum value of 1) other agents will not avoid this character as much. However it works in a different way to Priority.
A group of agents with FlowFollowingStrength set to a high value that all try to reach the same point will end up just settling to stationary positions around that point, none will push the others away to any significant extent. This is tricky to achieve with priorities as priorities are all relative, so setting all agents to a low priority is the same thing as not changing priorities at all.
Should be a value in the range [0, 1].
float
height
Height of the agent in world units.
Note
If a movement script (AIPath/RichAI/AILerp, anything implementing the IAstarAI interface) is attached to the same GameObject, this value will be driven by that script.
RVOLayer
layer = RVOLayer.DefaultAgent
Specifies the avoidance layer for this agent.
The collidesWith mask on other agents will determine if they will avoid this agent.
bool
lockWhenNotMoving = false
Automatically set locked to true when desired velocity is approximately zero.
This prevents other units from pushing them away when they are supposed to e.g block a choke point.
When this is true every call to SetTarget or Move will set the locked field to true if the desired velocity was non-zero or false if it was zero.
bool
locked
A locked unit cannot move.
Other units will still avoid it but avoidance quality is not the best.
int
maxNeighbours = 10
Max number of other agents to take into account.
A smaller value can reduce CPU load, a higher value can lead to better local avoidance quality.
Determines if the XY (2D) or XZ (3D) plane is used for movement.
float
obstacleTimeHorizon = 0.5f
How far into the future to look for collisions with obstacles (in seconds)
Current position of the agent.
Note that this is only updated every local avoidance simulation step, not every frame.
float
priority = 0.5f
How strongly other agents will avoid this agent.
Usually a value between 0 and 1. Agents with similar priorities will avoid each other with an equal strength. If an agent sees another agent with a higher priority than itself it will avoid that agent more strongly. In the extreme case (e.g this agent has a priority of 0 and the other agent has a priority of 1) it will treat the other agent as being a moving obstacle. Similarly if an agent sees another agent with a lower priority than itself it will avoid that agent less.
In general the avoidance strength for this agent is: if this.priority > 0 or other.priority > 0:
avoidanceStrength = other.priority / (this.priority + other.priority);
else:
avoidanceStrength = 0.5
float
radius
Radius of the agent in world units.
Note
If a movement script (AIPath/RichAI/AILerp, anything implementing the IAstarAI interface) is attached to the same GameObject, this value will be driven by that script.
Reference to the internal agent.
Vector3?
velocity
Current calculated velocity of the agent.
This is not necessarily the velocity the agent is actually moving with (that is up to the movement script to decide) but it is the velocity that the RVO system has calculated is best for avoiding obstacles and reaching the target.
You can also set the velocity of the agent. This will override the local avoidance input completely. It is useful if you have a player controlled character and want other agents to avoid it.
Setting the velocity using this property will mark the agent as being externally controlled for 1 simulation step. Local avoidance calculations will be skipped for the next simulation step but will be resumed after that unless this property is set again.
Note that if you set the velocity the value that can be read from this property will not change until the next simulation step.
Private/Protected Members
void
OnUpgradeSerializedData
(
)
Handle serialization backwards compatibility.
void
OnUpgradeSerializedData
(
)
void
Reset
()
Handle serialization backwards compatibility.
void
UpdateAgentProperties
()
void
UpgradeSerializedData
(
)
Cached reference to a movement script (if one is used)
float
centerBackingField = 1
float
heightBackingField = 2
float
radiusBackingField = 0.5f
Reference to the rvo simulator.
Cached tranform component.
Deprecated Members
void
ForceSetVelocity
(
)
Set the current velocity of the agent.
This will override the local avoidance input completely. It is useful if you have a player controlled character and want other agents to avoid it.
Calling this method will mark the agent as being externally controlled for 1 simulation step. Local avoidance calculations will be skipped for the next simulation step but will be resumed after that unless this method is called again.
void
Teleport
(
)
Teleport the agent to a new position.
Deprecated
Use transform.position instead, the RVOController can now handle that without any issues.
bool
enableRotation
Deprecated
float
maxSpeed
Deprecated
float
rotationSpeed
Deprecated
float
wallAvoidFalloff = 1
How much the wallAvoidForce decreases with distance.
The strenght of avoidance is: str = 1/dist*wallAvoidFalloff
Deprecated
This feature is currently disabled as it didn't work that well and was tricky to support after some changes to the RVO system. It may be enabled again in a future version.
float
wallAvoidForce = 1
An extra force to avoid walls.
This can be good way to reduce "wall hugging" behaviour.
Deprecated
This feature is currently disabled as it didn't work that well and was tricky to support after some changes to the RVO system. It may be enabled again in a future version.