Class RVONavmesh Extends GraphModifier
Adds a navmesh as RVO obstacles.
Add this to a scene in which has a navmesh or grid based graph, when scanning (or loading from cache) the graph it will be added as RVO obstacles to the RVOSimulator (which must exist in the scene).
Warning
You should only have a single instance of this script in the scene, otherwise it will add duplicate obstacles and thereby increasing the CPU usage.
If you update a graph during runtime the obstacles need to be recalculated which has a performance penalty. This can be quite significant for larger graphs.
In the screenshot the generated obstacles are visible in red. 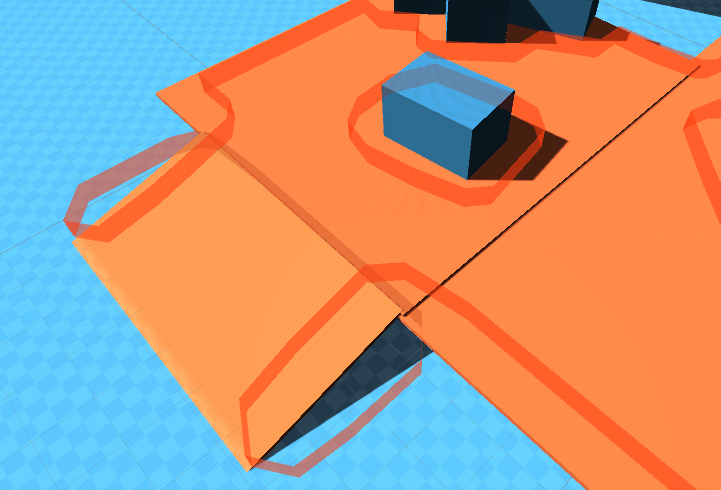
A* Pro Feature:
This is an A* Pathfinding Project Pro feature only. This function/class/variable might not exist in the Free version of the A* Pathfinding Project or the functionality might be limited.
The Pro version can be bought here
Public Methods
Called after graphs have been updated using GraphUpdateObjects.
Called at the end of the scanning procedure.
Called after cached graphs have been loaded.
Removes all obstacles which have been added by this component.
Public Variables
Height of the walls added for each obstacle edge.
Inherited Public Members
Called before graphs are updated using GraphUpdateObjects.
Called right after all graphs have been scanned.
Called right before graphs are going to be scanned.
Triggers an event for all active graph modifiers.
Private/Protected Members
Adds obstacles for a navmesh/recast graph.
Adds obstacles for a grid graph.
Last simulator used.
Obstacles currently added to the simulator.
Removes this modifier from list of active modifiers.
Adds this modifier to list of active modifiers.
Handle serialization backwards compatibility.
Handle serialization backwards compatibility.
Unique persistent ID for this component, used for serialization.
Maps persistent IDs to the component that uses it.