|
A* Pathfinding Project
3.6.1
The A* Pathfinding Project for Unity 3D
|
|
A* Pathfinding Project
3.6.1
The A* Pathfinding Project for Unity 3D
|
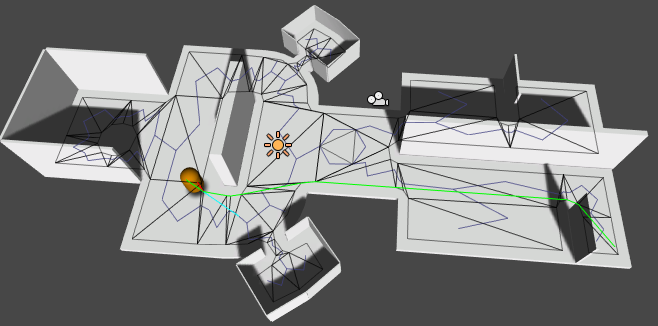
Generates graphs based on navmeshes. More...
Generates graphs based on navmeshes.
Navmeshes are meshes where each polygon define a walkable area. These are great because the AI can get so much more information on how it can walk. Polygons instead of points mean that the funnel smoother can produce really nice looking paths and the graphs are also really fast to search and have a low memory footprint because of their smaller size to describe the same area (compared to grid graphs).
Public Member Functions | |
| void | AddPortal (GraphNode n1, GraphNode n2, List< Vector3 > left, List< Vector3 > right) |
| void | BuildFunnelCorridor (List< GraphNode > path, int startIndex, int endIndex, List< Vector3 > left, List< Vector3 > right) |
| GraphUpdateThreading | CanUpdateAsync (GraphUpdateObject o) |
| bool | ContainsPoint (TriangleMeshNode node, Vector3 pos) |
| Returns if the point is inside the node in XZ space. | |
| override void | DeserializeExtraInfo (GraphSerializationContext ctx) |
| Deserializes graph type specific node data. | |
| void | GenerateMatrix () |
| override NNInfo | GetNearest (Vector3 position, NNConstraint constraint, GraphNode hint) |
| Returns the nearest node to a position using the specified NNConstraint. | |
| override NNInfo | GetNearestForce (Vector3 position, NNConstraint constraint) |
| This performs a linear search through all polygons returning the closest one. | |
| override void | GetNodes (GraphNodeDelegateCancelable del) |
| Calls a delegate with all nodes in the graph. | |
| void | GetTileCoordinates (int tileIndex, out int x, out int z) |
| Int3 | GetVertex (int index) |
| int | GetVertexArrayIndex (int index) |
| bool | Linecast (Vector3 origin, Vector3 end) |
| Returns if there is an obstacle between origin and end on the graph. | |
| bool | Linecast (Vector3 origin, Vector3 end, GraphNode hint, out GraphHitInfo hit) |
| Returns if there is an obstacle between origin and end on the graph. | |
| bool | Linecast (Vector3 origin, Vector3 end, GraphNode hint) |
| Returns if there is an obstacle between origin and end on the graph. | |
| bool | Linecast (Vector3 origin, Vector3 end, GraphNode hint, out GraphHitInfo hit, List< GraphNode > trace) |
| Returns if there is an obstacle between origin and end on the graph. | |
| override void | OnDestroy () |
| Function for cleaning up references. | |
| override void | OnDrawGizmos (bool drawNodes) |
| Draw gizmos for the graph. | |
| void | PostProcess () |
| override void | RelocateNodes (Matrix4x4 oldMatrix, Matrix4x4 newMatrix) |
| Transforms the nodes using newMatrix from their initial positions. | |
| void | ScanInternal (string objMeshPath) |
| Scans the graph using the path to an .obj mesh. | |
| override void | ScanInternal (OnScanStatus statusCallback) |
| Scans the graph, called from AstarPath.ScanInternal Override this function to implement custom scanning logic The statusCallback may be optionally called to show progress info in the editor | |
| override void | SerializeExtraInfo (GraphSerializationContext ctx) |
| Serializes graph type specific node data. | |
| void | Sort (Vector3[] a) |
| void | UpdateArea (GraphUpdateObject o) |
| void | UpdateAreaInit (GraphUpdateObject o) |
 Public Member Functions inherited from NavGraph Public Member Functions inherited from NavGraph | |
| virtual void | Awake () |
| This will be called on the same time as Awake on the gameObject which the AstarPath script is attached to. | |
| virtual int | CountNodes () |
| Count nodes in the graph. | |
| NNInfo | GetNearest (Vector3 position) |
| Returns the nearest node to a position using the default NNConstraint. | |
| NNInfo | GetNearest (Vector3 position, NNConstraint constraint) |
| Returns the nearest node to a position using the specified NNConstraint. | |
| virtual Color | NodeColor (GraphNode node, PathHandler data) |
| virtual void | PostDeserialization () |
| Called after all deserialization has been done for all graphs. | |
| void | Scan () |
| void | ScanGraph () |
| Consider using AstarPath.Scan () instead since this function might screw things up if there is more than one graph. | |
| void | ScanInternal () |
| Internal method for scanning graphs. | |
| void | SetMatrix (Matrix4x4 m) |
| Use to set both matrix and inverseMatrix at the same time. | |
| Public Member Functions inherited from INavmesh | |
| void | GetNodes (GraphNodeDelegateCancelable del) |
| Public Member Functions inherited from IUpdatableGraph | |
| GraphUpdateThreading | CanUpdateAsync (GraphUpdateObject o) |
| void | UpdateArea (GraphUpdateObject o) |
| Updates an area using the specified GraphUpdateObject. | |
| void | UpdateAreaInit (GraphUpdateObject o) |
| Public Member Functions inherited from IFunnelGraph | |
| void | AddPortal (GraphNode n1, GraphNode n2, List< Vector3 > left, List< Vector3 > right) |
| Add the portal between node n1 and n2 to the funnel corridor. | |
| void | BuildFunnelCorridor (List< GraphNode > path, int sIndex, int eIndex, List< Vector3 > left, List< Vector3 > right) |
| Public Member Functions inherited from INavmeshHolder | |
| void | GetTileCoordinates (int tileIndex, out int x, out int z) |
| Int3 | GetVertex (int i) |
| int | GetVertexArrayIndex (int index) |
| Public Member Functions inherited from IRaycastableGraph | |
| bool | Linecast (Vector3 start, Vector3 end) |
| bool | Linecast (Vector3 start, Vector3 end, GraphNode hint) |
| bool | Linecast (Vector3 start, Vector3 end, GraphNode hint, out GraphHitInfo hit) |
| bool | Linecast (Vector3 start, Vector3 end, GraphNode hint, out GraphHitInfo hit, List< GraphNode > trace) |
Static Public Member Functions | |
| static void | BuildFunnelCorridor (INavmesh graph, List< GraphNode > path, int startIndex, int endIndex, List< Vector3 > left, List< Vector3 > right) |
| static Vector3 | ClosestPointOnNode (TriangleMeshNode node, Int3[] vertices, Vector3 pos) |
| Returns the closest point of the node. | |
| static bool | ContainsPoint (TriangleMeshNode node, Vector3 pos, Int3[] vertices) |
| Returns if the point is inside the node in XZ space. | |
| static NNInfo | GetNearest (NavMeshGraph graph, GraphNode[] nodes, Vector3 position, NNConstraint constraint, bool accurateNearestNode) |
| static NNInfo | GetNearestForce (NavGraph graph, INavmeshHolder navmesh, Vector3 position, NNConstraint constraint, bool accurateNearestNode) |
| This performs a linear search through all polygons returning the closest one. | |
| static NNInfo | GetNearestForceBoth (NavGraph graph, INavmeshHolder navmesh, Vector3 position, NNConstraint constraint, bool accurateNearestNode) |
| This performs a linear search through all polygons returning the closest one. | |
| static bool | Linecast (INavmesh graph, Vector3 tmp_origin, Vector3 tmp_end, GraphNode hint, out GraphHitInfo hit) |
| Returns if there is an obstacle between origin and end on the graph. | |
| static bool | Linecast (INavmesh graph, Vector3 tmp_origin, Vector3 tmp_end, GraphNode hint, out GraphHitInfo hit, List< GraphNode > trace) |
| Returns if there is an obstacle between origin and end on the graph. | |
| static void | RebuildBBTree (NavMeshGraph graph) |
| Rebuilds the BBTree on a NavGraph. | |
| static void | UpdateArea (GraphUpdateObject o, INavmesh graph) |
| Static Public Member Functions inherited from NavGraph | |
| static bool | InSearchTree (GraphNode node, Path path) |
| Returns if the node is in the search tree of the path. | |
Public Attributes | |
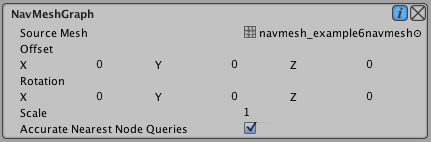
| bool | accurateNearestNode = true |
| More accurate nearest node queries. | |
| TriangleMeshNode[] | nodes |
| Vector3 | offset |
| Offset in world space. | |
| Vector3 | rotation |
| Rotation in degrees. | |
| float | scale = 1 |
| Scale of the graph. | |
| Mesh | sourceMesh |
| Mesh to construct navmesh from. | |
| int[] | triangles |
| Public Attributes inherited from NavGraph | |
| byte[] | _sguid |
| Used to store the guid value. | |
| AstarPath | active |
| Reference to the AstarPath object in the scene. | |
| bool | drawGizmos = true |
| uint | graphIndex |
| Index of the graph, used for identification purposes. | |
| bool | infoScreenOpen |
| Used in the editor to check if the info screen is open. | |
| uint | initialPenalty = 0 |
| Default penalty to apply to all nodes. | |
| Matrix4x4 | inverseMatrix = Matrix4x4.identity |
| Inverse of matrix. | |
| Matrix4x4 | matrix = Matrix4x4.identity |
| A matrix for translating/rotating/scaling the graph. | |
| string | name |
| Name of the graph. | |
| bool | open |
| Is the graph open in the editor. | |
Properties | |
| BBTree | bbTree [get, set] |
| TriangleMeshNode[] | TriNodes [get] |
| Int3[] | vertices [get, set] |
| Properties inherited from NavGraph | |
| Guid | guid [get, set] |
| Used as an ID of the graph, considered to be unique. | |
Private Member Functions | |
| void | GenerateNodes (Vector3[] vectorVertices, int[] triangles, out Vector3[] originalVertices, out Int3[] vertices) |
| Generates a navmesh. | |
Private Attributes | |
| BBTree | _bbTree |
| Bounding Box Tree. | |
| Int3[] | _vertices |
| Vector3[] | originalVertices |
| void BuildFunnelCorridor | ( | List< GraphNode > | path, |
| int | startIndex, | ||
| int | endIndex, | ||
| List< Vector3 > | left, | ||
| List< Vector3 > | right | ||
| ) |
|
static |
| GraphUpdateThreading CanUpdateAsync | ( | GraphUpdateObject | o | ) |
|
static |
Returns the closest point of the node.
| bool ContainsPoint | ( | TriangleMeshNode | node, |
| Vector3 | pos | ||
| ) |
Returns if the point is inside the node in XZ space.
|
static |
Returns if the point is inside the node in XZ space.
|
virtual |
| void GenerateMatrix | ( | ) |
|
private |
Generates a navmesh.
Based on the supplied vertices and triangles. Memory usage is about O(n)
|
static |
|
virtual |
Returns the nearest node to a position using the specified NNConstraint.
| position | The position to try to find a close node to |
| hint | Can be passed to enable some graph generators to find the nearest node faster. |
| constraint | Can for example tell the function to try to return a walkable node. If you do not get a good node back, consider calling GetNearestForce. |
Reimplemented from NavGraph.
|
virtual |
This performs a linear search through all polygons returning the closest one.
This is usually only called in the Free version of the A* Pathfinding Project since the Pro one supports BBTrees and will do another query
Reimplemented from NavGraph.
|
static |
This performs a linear search through all polygons returning the closest one.
|
static |
This performs a linear search through all polygons returning the closest one.
This will fill the NNInfo with .node for the closest node not necessarily complying with the NNConstraint, and .constrainedNode with the closest node complying with the NNConstraint.
|
virtual |
Calls a delegate with all nodes in the graph.
This is the primary way of "looping" through all nodes in a graph.
This function should not change anything in the graph structure.
Implements NavGraph.
| void GetTileCoordinates | ( | int | tileIndex, |
| out int | x, | ||
| out int | z | ||
| ) |
| Int3 GetVertex | ( | int | index | ) |
| int GetVertexArrayIndex | ( | int | index | ) |
| bool Linecast | ( | Vector3 | origin, |
| Vector3 | end | ||
| ) |
Returns if there is an obstacle between origin and end on the graph.
This is not the same as Physics.Linecast, this function traverses the graph and looks for collisions instead of checking for collider intersection.
| bool Linecast | ( | Vector3 | origin, |
| Vector3 | end, | ||
| GraphNode | hint, | ||
| out GraphHitInfo | hit | ||
| ) |
Returns if there is an obstacle between origin and end on the graph.
| [in] | origin | Point to linecast from |
| [in] | end | Point to linecast to |
| [out] | hit | Contains info on what was hit, see GraphHitInfo |
| [in] | hint | You need to pass the node closest to the start point This is not the same as Physics.Linecast, this function traverses the graph and looks for collisions instead of checking for collider intersection.
|
| bool Linecast | ( | Vector3 | origin, |
| Vector3 | end, | ||
| GraphNode | hint | ||
| ) |
Returns if there is an obstacle between origin and end on the graph.
| [in] | origin | Point to linecast from |
| [in] | end | Point to linecast to |
| [in] | hint | You need to pass the node closest to the start point This is not the same as Physics.Linecast, this function traverses the graph and looks for collisions instead of checking for collider intersection.
|
| bool Linecast | ( | Vector3 | origin, |
| Vector3 | end, | ||
| GraphNode | hint, | ||
| out GraphHitInfo | hit, | ||
| List< GraphNode > | trace | ||
| ) |
Returns if there is an obstacle between origin and end on the graph.
| [in] | origin | Point to linecast from |
| [in] | end | Point to linecast to |
| [out] | hit | Contains info on what was hit, see GraphHitInfo |
| [in] | hint | You need to pass the node closest to the start point |
| trace | If a list is passed, then it will be filled with all nodes the linecast traverses This is not the same as Physics.Linecast, this function traverses the graph and looks for collisions instead of checking for collider intersection.
|
|
static |
Returns if there is an obstacle between origin and end on the graph.
| [in] | graph | The graph to perform the search on |
| [in] | tmp_origin | Point to start from |
| [in] | tmp_end | Point to linecast to |
| [out] | hit | Contains info on what was hit, see GraphHitInfo |
| [in] | hint | You need to pass the node closest to the start point, if null, a search for the closest node will be done This is not the same as Physics.Linecast, this function traverses the graph and looks for collisions instead of checking for collider intersection.
|
|
static |
Returns if there is an obstacle between origin and end on the graph.
| [in] | graph | The graph to perform the search on |
| [in] | tmp_origin | Point to start from |
| [in] | tmp_end | Point to linecast to |
| [out] | hit | Contains info on what was hit, see GraphHitInfo |
| [in] | hint | You need to pass the node closest to the start point, if null, a search for the closest node will be done |
| trace | If a list is passed, then it will be filled with all nodes the linecast traverses This is not the same as Physics.Linecast, this function traverses the graph and looks for collisions instead of checking for collider intersection.
|
|
virtual |
Function for cleaning up references.
This will be called on the same time as OnDisable on the gameObject which the AstarPath script is attached to (remember, not in the editor). Use for any cleanup code such as cleaning up static variables which otherwise might prevent resources from being collected. Use by creating a function overriding this one in a graph class, but always call base.OnDestroy () in that function. All nodes should be destroyed in this function otherwise a memory leak will arise.
Reimplemented from NavGraph.
|
virtual |
Draw gizmos for the graph.
Reimplemented from NavGraph.
| void PostProcess | ( | ) |
|
static |
Rebuilds the BBTree on a NavGraph.
|
virtual |
Transforms the nodes using newMatrix from their initial positions.
The "oldMatrix" variable can be left out in this function call (only for this graph generator) since the information can be taken from other saved data, which gives better precision.
Reimplemented from NavGraph.
| void ScanInternal | ( | string | objMeshPath | ) |
Scans the graph using the path to an .obj mesh.
|
virtual |
Scans the graph, called from AstarPath.ScanInternal Override this function to implement custom scanning logic The statusCallback may be optionally called to show progress info in the editor
Implements NavGraph.
|
virtual |
Serializes graph type specific node data.
This function can be overriden to serialize extra node information (or graph information for that matter) which cannot be serialized using the standard serialization. Serialize the data in any way you want and return a byte array. When loading, the exact same byte array will be passed to the DeserializeExtraInfo function.
These functions will only be called if node serialization is enabled.
Reimplemented from NavGraph.
| void Sort | ( | Vector3[] | a | ) |
| void UpdateArea | ( | GraphUpdateObject | o | ) |
|
static |
| void UpdateAreaInit | ( | GraphUpdateObject | o | ) |
|
private |
Bounding Box Tree.
Enables really fast lookups of nodes.
|
private |
| bool accurateNearestNode = true |
More accurate nearest node queries.
When on, looks for the closest point on every triangle instead of if point is inside the node triangle in XZ space. This is slower, but a lot better if your mesh contains overlaps (e.g bridges over other areas of the mesh). Note that for maximum effect the Full Get Nearest Node Search setting should be toggled in A* Inspector Settings.
| TriangleMeshNode [] nodes |
| Vector3 offset |
Offset in world space.
|
private |
| Vector3 rotation |
Rotation in degrees.
| float scale = 1 |
Scale of the graph.
| Mesh sourceMesh |
Mesh to construct navmesh from.
| int [] triangles |
|
getset |
|
get |
|
getset |
 1.8.2
1.8.2 
