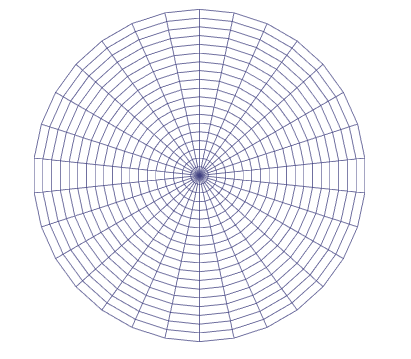
Example PolarGraphGenerator.cs
Shows a simple graph type generating a polar graph.
Tested with version 4.0.10
using System.Collections.Generic;
using UnityEngine;
// Include the Pathfinding namespace to gain access to a lot of useful classes
using Pathfinding;
// Required to save the settings
using Pathfinding.Serialization;
using Pathfinding.Util;
[JsonOptIn]
// Make sure the class is not stripped out when using code stripping (see https://docs.unity3d.com/Manual/ManagedCodeStripping.html)
[Pathfinding.Util.Preserve]
// Inherit our new graph from a base graph type
public class PolarGraph : NavGraph {
[JsonMember]
public int circles = 10;
[JsonMember]
public int steps = 20;
[JsonMember]
public Vector3 center = Vector3.zero;
[JsonMember]
public float scale = 2;
// Here we will store all nodes in the graph
public PointNode[] nodes;
GraphTransform transform;
public override bool isScanned => nodes != null;
PointNode CreateNode (Vector3 position) {
var node = new PointNode(active);
// Node positions are stored as Int3. We can convert a Vector3 to an Int3 like this
node.position = (Int3)position;
node.GraphIndex = graphIndex;
return node;
}
static Vector3 CalculateNodePosition (int circle, float angle, GraphTransform transform) {
// Get the direction towards the node from the center
var pos = new Vector3(Mathf.Sin(angle), 0, Mathf.Cos(angle));
// Multiply it with the circle number to get the node position in graph space
pos *= circle;
// Multiply it with the matrix to get the node position in world space
pos = transform.Transform(pos);
return pos;
}
class PolarGraphScanPromise : IGraphUpdatePromise {
public PolarGraph graph;
// In this method you may run async calculations required for updating the graph.
public IEnumerator<Unity.Jobs.JobHandle> Prepare() => null;
public void Apply (IGraphUpdateContext ctx) {
// Destroy previous nodes (if any)
graph.DestroyAllNodes();
var circles = graph.circles;
var steps = graph.steps;
// Create a 2D array which will contain all nodes
// This is just a tempoary array to make it easier to reference different nodes
PointNode[][] circleNodes = new PointNode[circles][];
// Create a matrix which just moves the nodes to #center
// and scales their positions by #scale
// The GraphTransform class has various utility methods for working with it
graph.transform = new GraphTransform(Matrix4x4.TRS(graph.center, Quaternion.identity, Vector3.one*graph.scale));
// Place the center node in the center
circleNodes[0] = new PointNode[] {
graph.CreateNode(CalculateNodePosition(0, 0, graph.transform))
};
// The size of the angle (in radians) each step will use
float anglesPerStep = (2*Mathf.PI)/steps;
for (int circle = 1; circle < circles; circle++) {
circleNodes[circle] = new PointNode[steps];
for (int step = 0; step < steps; step++) {
// Get the angle to the node relative to the center
float angle = step * anglesPerStep;
Vector3 pos = CalculateNodePosition(circle, angle, graph.transform);
circleNodes[circle][step] = graph.CreateNode(pos);
}
}
// Now all nodes are created, let's create some connections between them!
// Iterate through all circles
// circle 0 is just the center node so we skip that for now
for (int circle = 1; circle < circles; circle++) {
for (int step = 0; step < steps; step++) {
// Get the current node
PointNode node = circleNodes[circle][step];
// The nodes here will always have exactly four connections, like a grid, but polar.
// Except for those in the last circle which will only have three connections
int numConnections = circle < circles-1 ? 4 : 3;
var connections = new Connection[numConnections];
// Get the next clockwise node in the current circle.
// The last node in each circle should be linked to the first node
// in the circle which is why we use the modulo operator.
connections[0] = new Connection(circleNodes[circle][(step+1) % steps], 0, isOutgoing: true, isIncoming: true);
// Counter clockwise node. Here we check for underflow instead
connections[1] = new Connection(circleNodes[circle][(step-1+steps) % steps], 0, isOutgoing: true, isIncoming: true);
// The node in the previous circle (in towards the center)
if (circle > 1) {
connections[2] = new Connection(circleNodes[circle-1][step], 0, isOutgoing: true, isIncoming: true);
} else {
// Create a connection to the middle node, special case
connections[2] = new Connection(circleNodes[circle-1][0], 0, isOutgoing: true, isIncoming: true);
}
// Are there any more circles outside this one?
if (numConnections == 4) {
// The node in the next circle (out from the center)
connections[3] = new Connection(circleNodes[circle+1][step], 0, isOutgoing: true, isIncoming: true);
}
// Set all connection costs based on the distance between the nodes
for (int q = 0; q < connections.Length; q++) {
// Node.position is an Int3, here we get the cost of moving between the two positions
connections[q].cost = (uint)(node.position-connections[q].node.position).costMagnitude;
}
node.connections = connections;
}
}
// The center node is a special case, so we have to deal with it separately
PointNode centerNode = circleNodes[0][0];
centerNode.connections = new Connection[steps];
// Assign all nodes in the first circle as connections to the center node
for (int step = 0; step < steps; step++) {
centerNode.connections[step] = new Connection(
circleNodes[1][step],
// centerNode.position is an Int3, here we get the cost of moving between the two positions
(uint)(centerNode.position-circleNodes[1][step].position).costMagnitude,
isOutgoing: true,
isIncoming: true
);
}
// Store all nodes in the nodes array
List<PointNode> allNodes = new List<PointNode>();
for (int i = 0; i < circleNodes.Length; i++) {
allNodes.AddRange(circleNodes[i]);
}
graph.nodes = allNodes.ToArray();
// Set all the nodes to be walkable
for (int i = 0; i < graph.nodes.Length; i++) {
graph.nodes[i].Walkable = true;
}
}
}
protected override IGraphUpdatePromise ScanInternal () => new PolarGraphScanPromise { graph = this };
public override void GetNodes (System.Action<GraphNode> action) {
if (nodes == null) return;
for (int i = 0; i < nodes.Length; i++) {
// Call the delegate
action(nodes[i]);
}
}
}